ПРОГНОЗИРОВАНИЕ ЗНАЧЕНИЙ ПАРАМЕТРОВ ВОЗДУШНЫХ ОБЪЕКТОВ НА ЭТАПЕ ИХ АНАЛИЗА
Антропов В.В.
ORCID: 0000-0002-8019-5164, аспирант,
Санкт-Петербургский Горный университет
ПРОГНОЗИРОВАНИЕ ЗНАЧЕНИЙ ПАРАМЕТРОВ ВОЗДУШНЫХ ОБЪЕКТОВ НА ЭТАПЕ ИХ АНАЛИЗА
Аннотация
Сформирована исследовательская выборка, которая применялась для демонстрации работоспособности прогнозирования значений признаков воздушных объектов. Рассмотрено применение кластеризации семействами алгоритмов k-means и g-means в задачах распознавания воздушных объектов в условиях неполноты и недостоверности данных. Подчёркнута важность кластеризации в задачах распознавания. Проведено прогнозирование значений параметров воздушных объектов. Рассмотрена возможность более точного прогнозирования признаков воздушных объектов уже после этапа их кластеризации.
Ключевые слова: авиация, воздушные объекты, распознавание, радиолокационное распознавание, кластеризация, кластеризации k-means и g-means, прогнозирование с помощью линейной регрессии.
Antropov V.V.
ORCID: 0000-0002-8019-5164, Postgraduate student,
St. Petersburg Mining University
FORECASTING VALUES OF AIR OBJECT PARAMETERS DURING THEIR ANALYSIS
Abstract
A research sample was formed, and used to demonstrate the ability to predict the values of the parameters of air objects. The application of clustering by families of k-means and g-means algorithms in problems of recognition of air objects under the conditions of incompleteness and unreliability of data is considered in the paper, the importance of clustering in recognition problems is highlighted. The prediction of the values of the parameters of air objects is carried out and the possibility of more precise prediction of the parameters of air objects after their clustering is considered.
Keywords: aviation, air objects, recognition, radar detection, clustering, k-means and g-means clustering, linear regression prediction.
С начала XX-ого века человечество стало развивать авиацию. От допотопного аппарата, изобретённого братьями Райт, до тяжелейших металлических монстров, напичканных электроникой. Развитие авиации шло в ногу с развитием технологий, и сейчас уже конструкторы заявляют о возможности создания самолётов шестого поколения. Каждая новая эпоха ставила перед человечеством новые сложные задачи, решать которые, оно стало с помощью авиации. Примитивные летательные аппараты начала XX-ого века, совершенствуясь, стали отвечать за конкретные направления жизнедеятельности человека. Авиация широко применяется в военных конфликтах, в логистических целях, в целях пассажироперевозок и пр. В связи с увеличением количества воздушных объектов, возникла проблема с контролем воздушной обстановки. Одной из важнейших задач контроля над воздушными объектами, является задача оперативной обработки информации, связанной с распознаванием типов воздушных объектов, и возможных ситуаций, связанных с их действиями. Обработку информации о летательных аппаратах следует максимально автоматизировать, максимально сократив человеческий фактор, и максимально оптимизировать процесс обработки информации.
Обработка данных о летательных аппаратах содержит ряд трудностей. Основные из них, неполнота информации, её недостоверность, недостаточное быстродействие, человеческий фактор и пр. Распознавание воздушных объектов производится по ряду признаков, получаемых средствами слежения. В результате обработки признаков воздушных объектов, мы делаем вывод о принадлежности летательного аппарата к тому или иному классу.
Выделено четыре основных этапа в распознавании летательных аппаратов:
- Селекция отметок воздушных объектов на фоне помех;
- Классификация воздушных объектов;
- Опознавание воздушных объектов;
- Оценка состояния и контроль действий целей воздушных объектов.
Большинство исследователей делят методики определения воздушных объектов на три типа: визуальные, траекторные и радиолокационные. В данной работе представлена методика радиолокационного распознавания.
В статье [4, С. 6-9] подробно описывался процесс кластеризации воздушных объектов. Была образована выборка из нескольк их летательных аппаратов, которые, в свою очередь были отнесены к тем, или иным кластерам. Кластеризация проводилась семействами алгоритмов k-means и g-means. Данные алгоритмы обычно используются в решении задач описательной бизнес-аналитики. В ходе исследований они продемонстрировали свою работоспособность и при работе с признаками воздушных объектов. Для обработки данных о воздушных объектах и применении алгоритмов кластеризации использовалось средство Data Mining. В качестве характеристик воздушных объектов, на основе которых и будут созданы кластеры, были взяты длина (м), высота (м), площадь крыла (м ), размах крыла (м), практический потолок (м), максимальная скорость на высоте (км/ч) воздушных объектов. Результаты кластеризации алгоритмами k-means и g-means представлены на рис.1 и рис.2.

Рис. 1 – Общий набор после кластеризации алгоритмом k-means
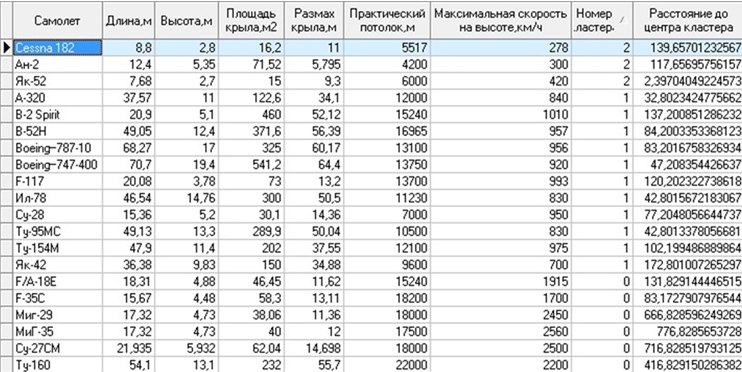
Рис. 2 – Общий набор после кластеризации алгоритмом g-means
По итогам кластеризации можно спрогнозировать значения тех или иных признаков воздушных объектов, которые были утеряны или отсутствовали вовсе в процессе обработки информации.
Прогноз (целевая группировка прогнозов) состоит из объекта исследования и прогнозного фона. Под объектом исследования понимают предмет, область, конфигурацию и т.п. Объект исследования – это ведущее направление прогноза, а прогнозный фон, в свою очередь, вспомогательные направления прогноза.
Введено определение переменной объекта прогнозирования. Переменная объекта прогнозирования – это характеристика объекта (предмета, конфигурации, области и т.п.) прогнозирования, которую берут в качестве переменной для составления прогноза. Переменные объекта прогнозирования бывают двух типов: значащие (важная для описания объекта) и незначащие. Их также называют эндогенными (внутренние, отражающие свойства самого объекта) и экзогенные (внешние, отражающие свойства прогнозного фона).
Объект (предмет, процесс, действие, состояние) прогнозирования – явление природы или общественной жизни, развитие которого можно спрогнозировать; совокупность предметов, явлений и процессов, будущее состояние которых необходимо знать для оптимального принятия решения. Совокупность можно сравнить с системой.
Выбранный метод прогнозирования вычисляет или предсказывает будущее значение по существующим значениям. Предсказываемое значение - это значение y, соответствующее заданному значению x. Значения x и y известны; новое значение предсказывается с использованием линейной регрессии. Эта функция широко применяется в бизнес-аналитике для прогнозирования будущих продаж, потребностей в оборудовании или тенденций потребления. Применение её для прогнозирования значений признаков воздушных объектов может сократить возможность потенциальной ошибки, в случае если оператор по каким-либо причинам сомневается, или же заведомо известно, что величина, сравниваемая с прогнозируемой, может не соответствовать действительности. Также данный метод можно применить в том случае, если интересующее нас значение признака воздушного объекта отсутствует вовсе.
Уравнение для функции прогнозирования имеет вид a+bx, где:
![]() и
и ![]() , где x и y - средние значения выборок.
, где x и y - средние значения выборок.
Результаты исследования представлены на рис. 3.

Рис. 3 – результаты прогнозирования признака летательного аппарата
За исходные данные были взяты значения длины (признак х) воздушного объекта одного кластера (кластер 0, рис. 2) и его высоты (признак у). Из рисунка видно, что вычисленное значение высоты летательного аппарата (13,52 м) не сильно расходится с реальным значением, которое можно встретить в специализированных справочниках (13,1 м).
Идея данного метода состоит в том, что для того, чтобы найти признак интересующего нас воздушного объекта, мы выделяем признаки других и, с помощью линейной регрессии, находим значение признака интересующего нас летательного аппарата.
Перед проведением прогнозирования обучающая выборка воздушных объектов была разбита на кластеры. Предполагается, что внутрикластерное прогнозирование даст более точный результат, как если бы мы использовали признаки всей обучающей выборки. Классификация воздушных объектов очень обширна, и брать для расчетов значений признаков, допустим, крупногабаритной авиации, значения признаков вертолётов представляется делом малоперспективным, и ведущим к ошибочным расчётам.
Данная методика требует дальнейшего изучения и доработок, но уже сейчас можно с уверенностью сказать, что прогнозирование признаков воздушного объекта с помощью признаков других воздушных объектов одной группы существенно повышает достоверность информации, и решает проблему её неполноты, если таковая имеется.
Перспектива вышеизложенной методики видится в том, чтобы увеличить количество воздушных объектов в обучающей выборке, а также и количество признаков, которые участвуют в кластеризации и прогнозировании. Увеличение количества воздушных объектов и их признаков позволит более точно определить кластеры, по которым будут распределены летательные аппараты из обучающей выборки, что позволит применить в прогнозировании значения признаков, которые наиболее соответствуют значению признака интересующего нас воздушного объекта.
Список литературы / References
- Deductor. Руководство по алгоритмам. Версия 5.2.0. 1995-2010 Компания BaseGroup Labs www.basegroup.ru - 38 с.
- Антропов В. В. Алгоритм вторичной обработки информации при траекторном распознавании. / Антропов В. В., Мазаков Е. Б. // Наука, образование, общество: тенденции и перспективы развития: материалы III Междунар. науч.-практ. конф. 11 декабря 2016 г. / Интерактивплюс. Центр Научного Сотрудничества. - Чебоксары, 2016. - с. 13-21.
- Антропов В. В. Методика определения типа летательного аппарата. / Антропов В. В., Мазаков Е. Б. // Международный научно-исследовательский журнал. - 2016. - №01. - С. 51-54.
- Антропов В. В. Применение алгоритмов кластеризации k-means и g-means в задачах распознавания воздушных объектов / В. В. Антропов // Международный научно-исследовательский журнал. - 2017. - №07. - С. 6-9.
- Антропов В. В. Универсальность методов комплексной оценки параметров. / Антропов В. В., Бугаев И. В. // Научные исследования: от теории к практике. Материалы VIII Междунар. науч.-практ. конф. 7 июня 2016 г. Чебоксары / Интерактивплюс. Центр Научного Сотрудничества. - Чебоксары, 2016. - с. 212-215.
- Бонгард М.М. Проблема узнавания / М. М. Борнгард. - М.: Наука, 1967. - 321 с.
- Лебедев В. В. Информационные технологии бизнес-аналитики. Система подготовки принятия решения Deductor: учеб. пособие. Кафедра информационных технологий в бизнесе / В. В. Лебедев, А. И. Дерябин. - НИУ ВШЭ ПФб 2011. - 190 с.
- Пивкин В.Я. Нечеткие множества в системах управления. / В. Я. Пивкин, Е. П. Бакулин, Д. И. Кореньков; под ред. Ю. Н. Золотухина - М. 2002. - 39 с.
- Уоссермен Ф. Нейрокомпьютерная техника: теория и практика / Ф. Уоссермен. - М.: Мир, 1992. - 240 с.
- Яковлев С.С. Система распознавания движущихся объектов на базе искусственных нейронных сетей / С. С. Яковлев. - Минск, 2004. - 230-234 с.
Список литературы на английском языке / References in English
- Rukovodstvo po algoritmam. Versiya 5.2.0. [Deductor. Algorithm guide. Version 5.2.0]. 1995-2010 BaseGroup Labs Company, 2013 - p. 38.
- Antropov V. V. Algoritm vtorichnoj obrabotki informacii pri traektornom raspoznavanii. [Algorithm of secondary information processing in trajectory recognition ] / Antropov V. V., Mazakov E. B. // Nauka, obrazovanie, obshhestvo: tendencii i perspectivy pazvitija. Materialy III Mezhdunar. nauch.-prakt. konf. 11 dekabrja 2016 g. [Science, education, society: trends and development prospects. Materials of the III International Scientific and Practical Conference 11 December 2016] Cheboksary / Interaktivpljus. Centr nauchnogo sotrudnichestvа [InteractivePlus. Center for Scientific Cooperation]. - Cheboksary, 2016. - pp. 13-21 [in Russian]
- Antropov V. V. Metodika opredelenija tipa letatel’nogo apparata [Method for determining aircraft type] / Antropov V. V., Mazakov E. B. // Mezhdunarodnyj nauchno-issledovatelskij zhurnal. [International Research Journal] 2016. - №01. - P. 51-54 [in Russian]
- Antropov V. V. Primenenie algoritmov klasterizacii k-means i g-means v zadachah raspoznavanija vozdushnyh obektov. [Application of k-means and g-means clustering algorithms in problems of air object recognition] / V. V. Antopov // Mezhdunarodnyj nauchno-issledovatelskij zhurnal. [International Research Journal] - 2017. - №07. - P. 6-9. [in Russian]
- Antopov V. V. Universal’nost’ metodov kompleksnoj ocenki parametov. [The universality of the methods of complex estimation of parameters] / Antropov V. V., Bugaev I. V. // Nauchnye issledovanija: ot teorii k praktike. Materialy VII Mezhdunar. nauch.-prakt. konf. 7 ijunja 2016 g. [Scientific research: from theory to practice. Materials VIII International Scientific and Practical Conference 7 June 2016] Cheboksary / Interaktivpljus. Centr nauchnogo sotrudnichestvа [InteractivePlus. Center for Scientific Cooperation]. - Cheboksary, 2016. - pp. 212-215 [in Russian]
- Bongard M. M. Problema uznavanija [The problem of recognition] / M. M. Bongard. - M.: Nauka, 1967. - 321 p. [in Russian]
- Lebedev V. V. Informacionnye tehnologii biznes-analitiki. Sistema podgotovki prinjatija reshenija Deductor: ucheb. posobie. Kafedra informacionnyh tehnogij v biznese [Information technology business intelligence. Decision making system Deductor: tutorial. Department of Information Technologies] / V. V. Lebedev, A. I. Deryabin - NIU VSHE PFb, 2011. -190 p. [in Russian]
- Pivkin V.Y. Nechedkie mnozhestva v sistemah upravlenija [Fuzzy sets in management systems] / Pivkin V.Y., Bakunin E.P, Korenjkov D.I.; edited by J. N. Zolotuhina - M.: Mir, 2002. - 39 p. [in Russian]
- Yakovlev S.S. Sistema raspoznavanija dvizhushhihsja obektov na baze isskustvennyh nejronnyh setej [Recognition system of moving objects based on artificial neural networks] / S. S. Yakovlev. - Minsk, 2004. - 230-234 p. [in Russian]
- Wosserman F. Nejrokomp’juternaja tehnika: teorija i praktika [Neural Computing. Theory and Practice] / F. Wosserman M.: Mir, 1992. - 240 p. [in Russian]