ОСУЩЕСТВЛЕНИЕ ПЕРЕДАЧИ ДАННЫХ РОБОТИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВОМ С ОС ANDROID
Косолапов К.В.1, Хайрулин А.В.2, Свалов Д.В.3, Набиев В.Р.4, Гафаров Р.Р.5
1Аспирант,
2студент,
3студент,
4студент,
5студент,
Магнитогорский государственный технический университет им. г.и. Носова
Работа выполнена при поддержке гранта Фонда содействия развитию малых форм предприятий в научно-технической сфере
ОСУЩЕСТВЛЕНИЕ ПЕРЕДАЧИ ДАННЫХ РОБОТИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВОМ С ОС ANDROID
Аннотация
При разработке мобильных роботов телеприсутствия, одной и важных задач, является реализация методов управления узлами системы и каналов передачи данных. В данной статье описывается решение задачи управления роботом на колесной платформе, построенное на технологии беспроводной передачи данных Bluetooth.
Ключевые слова: робототехника, алгоритмы управления, беспроводная передача данных.
Kosolapov K.V.1, Khairulin A.V.2 , Svalov D.V.3, Nabiyev V.R.4, Gafarov R.R.5
1Postgraduate student,
2student,
3studen,
4studen,
5studen,
Magnitogorsk State Technical University of G.I. Nosov
This work was supported by a grant of the Fund for Assistance of Small Innovative Enterprises in the scientific and technical sphere
IIMPLEMENTATION OF DATA ROBOTIC PLATFORM AND DEVICES WITH OS ANDROID
Abstract
There are one important task of developing mobile robotics, is to implement the management system nodes and data links. This article describes the solution of the problem on a wheeled robot control platform, built on the technology of wireless data transmission Bluetooth.
Keywords: robotics, control algorithms, wireless data transmission.
Управление роботом-платформой через BT (здесь и далее сокращение Bluetooth) - модуль осуществляется с планшетного компьютера с операционной системой Android из написанного Android-приложения [4]. Схематически это представлено на рисунке 1.

Рис. 1 - Схематическое представление управления роботом-платформой
Технология BT и Android были выбраны по следующим причинам: технология BT позволяет устанавливать соединение и передавать данные устройству удаленному до ста метров, а также проста в использовании. Android удобен тем, что поддержка разработки приложений для этой операционной среды обширна и доступно множество различных API (Application Programming Interface – интерфейс создания приложения ).
Используемая среда разработки – Android Studio, основанная на платформе IntelliJ IDEA.
Начнем с объявления прав на доступ использования BT на планшете (в проекте app/manifests/AndroidManifest.xml:
<uses-permission android:name="android.permission.BLUETOOTH" />
<uses-permission android:name="android.permission.BLUETOOTH_ADMIN" />
Затем, в res/layout/activity_main.xml оформляем основное activity (непосредственно окно приложения с которым работает пользователь). А именно создадим необходимые кнопки и поле текстовых сообщений для команд. Теперь переходим в src/../MainActivity.java – здесь будет написан основной код. Включим пакет API для работы с BT:
import android.bluetooth.*;
Создается экземпляр класса BluetoothAdapter с помощью getDefaultAdapter. Если getDefaultAdapter возвратит значение null, то появится сообщение - "There is no bluetooth adapter here!", если BT-адаптер выключен - "Bluetooth adapter is turned off", если включен "спариваем" BT-адаптер с BT-модулем робота.
В методе connectBluetooth() создаем клиентское подключение, где иниициализируется MY_UUID строкой:
public class WorkingThread implements Runnable {
private final UUID MY_UUID = UUID.fromString("00001101-0000-1000-8000-00805F9B34FB");
Затем, используем конструкцию try–catch для обработки возможных ошибок. В случае неудачи будет выведено сообщение: "Unable to create a bluetooth socket". Если всё прошло успешно выполняется подключение, в противном случае переходим к методу disconnectBluetooth() и выводим: "Unable to connect to a device".
Метод sendViaBluetooth(String s), в котором передаются команды роботу, также проверяется отправка команд роботу через try-catch.
Алгоритм программы представлен в виде блок-схемы на рисунке 2.
private boolean sendViaBluetooth(String s) {
try {
blue_socket.getOutputStream().write(s.getBytes());
} catch (IOException e) {
connectBluetooth();
try {
blue_socket.getOutputStream().write(s.getBytes());
} catch (IOException ee) {
sudoMakeMeASandwich("Unable to send a message via Bluetooth");
return false;
}
}
return true;
}
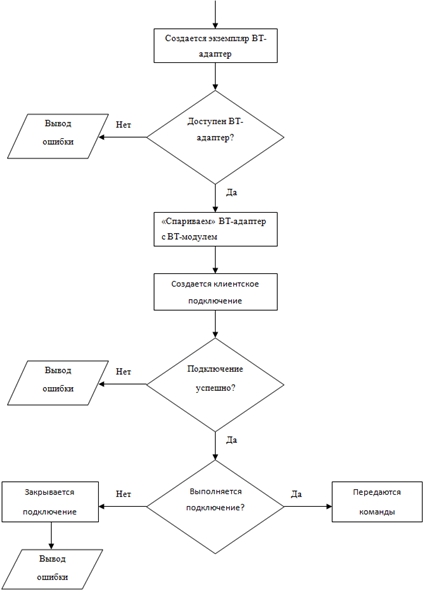
Рис. 2 - Блок-схема алгоритма программы
Данная организация управления роботом-платформой целесообразна по отношению к требованиям проекта и позволяет передавать команды роботу-платформе на необходимое расстояние. Особенности этой организации управления в стабильности, определенной надежности связи и независимости от стационарного передатчика.
Литература
- Хашими С., Коматинени Д. Разработка приложений для Android. СПб.: Питер, 2011г.
- Голощапов А. Ю. Google Android. Программирование для мобильных устройств. СПб.: БХВ-Петербург, 2011 г.
- Косолапов К.В., Обухова Е.А.. Поверхности свободной формы в микротопографии поверхности. Международный научно-исследовательский журнал, 2014. ISSN: 2303-9868. № 10-1 (29). С. 15-17.
- Косолапов К.В., Распутин Д.А., Тюгаев М.В., Адигамов И.С.. Разработка универсального модульного автоматизированного комплекса удалённого присутствия. Международный научно-исследовательский журнал, 2014. ISSN: 2303-9868. № 8-1 (27). С. 22-25.
References
- S. Hashemi, Komatineni D. Developing applications for Android. SPb .: Piter, 2011.
- Goloshchapov AY Google Android. Programming for mobile devices. SPb .: BHV-Petersburg, 2011
- Kosolapov K.V., Obukhova EA .. Freeform surfaces in the micro-surface. International Research Journal, 2014. ISSN: 2303-9868. № 10-1 (29). p. 15-17.
- Kosolapov K.V., Rasputin D.A., Tyugay M.V., Adigamov I.S. .. Development of a universal modular automated complex remote presence. International Research Journal, 2014. ISSN: 2303-9868. № 8-1 (27). p. 22-25.