ОСОБЕННОСТИ ПРИМЕНЕНИЯ ETHERNET В ИНФОРМАЦИОННОЙ СРЕДЕ СИСТЕМ УПРАВЛЕНИЯ
Преображенский Н. Б.1, Холопов Ю. А.2, Дам Чонг Нам3
1Кандидат технических наук, 2Ведущий инженер, Институт точной механики и вычислительной техники им. С. А. Лебедева РАН, Москва
3Магистрант, Московский физико-технический институт (Государственный университет)
Работа выполнена при поддержке Министерства образования и науки Российской Федерации
ОСОБЕННОСТИ ПРИМЕНЕНИЯ ETHERNET В ИНФОРМАЦИОННОЙ СРЕДЕ СИСТЕМ УПРАВЛЕНИЯ
Аннотация
В статье с помощью протокола Fast Ethernet предложен алгоритм построения гибкой системы коммутации с минимальной задержкой.
Ключевые слова: Fast Ethernet, IEEE 802.3, PHY, 4B/5B, MLT.
Preobrazhensky N.B.1, Kholopov Yu.A.2, Dam Trong Nam3
1Candidate of Technical Sciences, 2Leading engineer, Lebedev Institute of Precision Mechanics and Computer Engineering
3Master student, Moscow Institute of Physics and Technology
FEATURES OF APPLICATION OF ETHERNET IN THE INFORMATION ENVIRONMENT OF CONTROL SYSTEM
Abstract
Algorithm for constructing a flexible switching system with minimal delay is proposed via Fast Ethernet protocol.
Keywords: Fast Ethernet, IEEE 802.3, PHY, 4B/5B, MLT.
В распределённых системах управления (СУ), компоненты могут находиться в удалении от центрального вычислителя, поэтому актуальна проблема минимизации задержек во внутренних каналах связи. Для поддержания короткого цикла регулирования, нужна высокая скорость обменов и существует проблема выборки протокола передачи данных. Задача высокоскоростного обмена данными в системах управления реального времени может решаться с помощью совместимого использования разных протоколов, но применение Ethernet кажется предпочтительным благодаря широкому спектру аппаратных решений для разнотипных компонентов сети и поддержке различных физических сред передачи данных.
В универсальных сетях, протокол Ethernet построен на принципе случайного доступа к среде передачи данных, для этого разработаны Ethernet–коммутаторы, обеспечивающие топологию точка–точка с помощью МАС–адресов. Коммутатор выполняет задачу выборки направления потока данных из модуля верхнего уровня. Применение таких коммутаторов в системах управления может быть не всегда эффективным, в связи с избыточностью их функций для задач СУ.
Особенностью информационных обменов в информационной среде систем управления является цикличность, позволяющая уменьшать задержку путем сокращения избыточности стандартного сетевого протокола. В работе разработан коммутатор с минимальной задержкой, который обменивается данными с несколькими узлами через стандартный протокол Fast Ethernet, и сокращенный протокол Fast Ethernet. В качестве узлов могут быть контроллеры периферии (КП) или ведущие компоненты системы верхнего уровня (ВКСВУ) (рис.1).
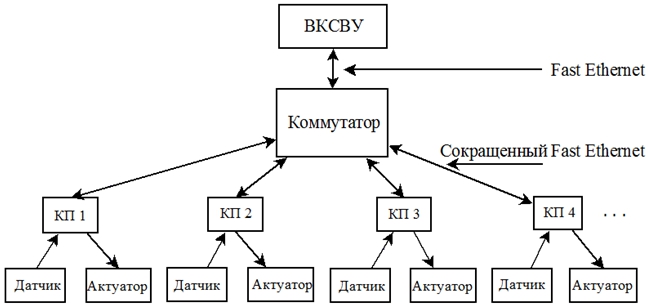
Рис. 1 - Схема соединения коммутатора с узлами
При реализации коммутатора используется формат пакета IEEE 802.3 на уровне связи между коммутатором и ВКСВУ. На уровне связи между коммутатором и КП, пакет обмена был сокращен путем удаления некоторых избыточностей стандартного пакета для уменьшения задержки. Минимальная задержка получается благодаря аппаратному преобразованию пакетов СУ верхнего уровня в несколько пакетов для нижестоящих узлов, с адресацией последних по подключению. Обратное преобразование пакетов, также производится в коммутаторе аппаратно, с минимальной задержкой. Корректность пакетов контролируется по CRC32. Общая схема реализации коммутатора показана на рис. 2.
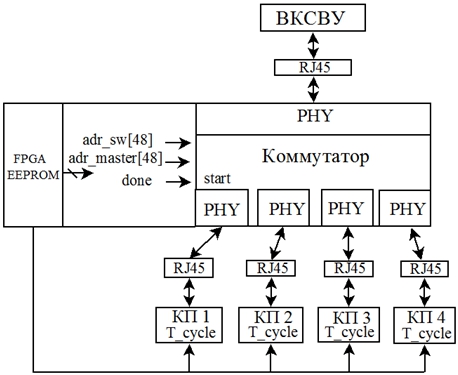
Рис. 2 - Схема коммутации узла системы
При разработке коммутатора и реализации алгоритма его функционирования решались следующие задачи:
- определение длительности цикла функционирования системы и расчет интервалов опроса узлов;
- задача конфигурирования системы и загрузки параметров в конфигурационную память (EEPROM);
- задача чтения - обработки конфигурационных параметров в цикле функционирования системы;
- задача получения пакета управления от ВКСВУ и передачи пакета состояния ВКСВУ;
- задача передачи пакет управления КП и получения пакета состояния от КП;
- задача реализация физического интерфейса для N+1 Ethernet - портов между коммутатором с N КП и ВКСВУ.
Принцип работы коммутатора
При включении системы, начинается процесс конфигурации. Коммутатор и КП получают конфигурационные параметры из EEPROM. После чего, коммутатор переходит в состояние ожидания. Коммутатор наблюдает линию связи с ВКСВУ. Получив запрос и проверив истинность полученных данных, коммутатор рассылает всем подключенным КП пакет управления. Получив пакет управления от коммутатора, КП обрабатывают запрос и в цикле управления пересылают обратно обрабатываемые данные. КП являются самоактивными устройствами, т.е, они периодически передают данные через интервал времени одного цикла обращения, полученный из конфигурационной памяти. После получения пакета состояния от КП, коммутатор формирует пакет состояния для ответа на запрос от ВКСВУ.
В отладочной плате не хватает необходимых Ethernet–портов. Было реализован блок физического интерфейса – «модуль PHY» (рис. 3). Поскольку Fast Ethernet может использовать различный тип кабеля, то для каждой среды требуется уникальное предварительное преобразование сигнала. Преобразование также требуется для эффективной передачи данных: сделать передаваемый код устойчивым к помехам, возможным потерям, либо искажениям отдельных его элементов (бодов), для обеспечения эффективной синхронизации тактовых генераторов на передающей или приемной стороне [1].
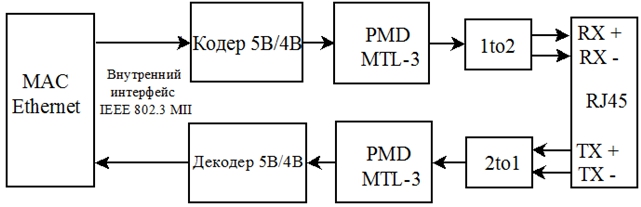
Рис. 3 - Блок физического интерфейса
На подуровне кодирования, кодируется/декодируется данные поступающие от/к уровня MAC с использованием алгоритмов 4B/5B[1]. На подуровне физического присоединения, осуществляется физическое кодирование MLT-3[1].
Время одного цикла обращения узлов – время, через которое все КП периодически передают данные. Оно состоит из времени передачи пакетов в одном обращении, времени подготовки данных в КП и времени ожидания нового запроса из ВКСВУ. Обычно время подготовки данных в КП есть время подготовки данных медленнейшего контроллера периферии. Так как темп работы устройств низкого уровня заранее не известен, для открытости задачи выбран режим, когда время одного цикла обращения – время передачи пакетов в одном обращении и время ожидания нового запроса из ведущего верхнего уровня. Другими словами это темп запросов из ведущего верхнего уровня. Этот параметр может быть рассчитан при построении системы управления.
Коммутатор был реализован в FPGA. Коммутатор позволяет получить максимальную скорость систем управления с минимальной задержкой и удовлетворяет тенденции расширения использования Ethernet–устройств в системах управления.
Для развития рассмотренного решения можно сделать коммутатор доступным нескольким ВКСВУ в зависимости от потребности, при этом сохраняется общая логика, что означает открытость решения задачи сверху. При необходимости использования другой модификации Ethernet, то общая идея аппаратного решения сохраняется путем изменения темпа работы и механизма «модуль PHY».
Литература
- Лаем Куин, Ричард Рассел. Fast Ethernet; Пер. с англ. под ред. К. Королькова. М. ООО "Спаррк" Киев BHV, 1998. – 444 с. ил. 23 см.
References
- Laem Kuin, Richard Rassel. Fast Ethernet; Per. s angl. pod red. K. Korol'kova. M. OOO "Sparrk" Kiev BHV, 1998. – 444 s. il. 23 sm.