ОДНОМЕМБРАННЫЙ ПРИВОД С ПЕРЕМЕННОЙ ЭФФЕКТИВНОЙ ПЛОЩАДЬЮ
Сысоев С.Н.1, Воздуган А.А.2
1 ORCID: 0000-0001-8255-9497, Доктор технических наук, 2 ORCID: 0000-0003-1356-0253, Аспирант, Владимирский государственный университет имени А.Г. и Н.Г. Столетовых
ОДНОМЕМБРАННЫЙ ПРИВОД С ПЕРЕМЕННОЙ ЭФФЕКТИВНОЙ ПЛОЩАДЬЮ
Аннотация
Анализируются приводы с рабочей камерой, ограниченной мембраной, соединенной со штоком, широко применяемые в гидропневмоаппаратуре. Предлагается повышение эффективности их функционирования путем использования изменения величины эффективной площади мембраны в процессе их работы. Описано новое устройство с переменной эффективной площадью мембраны, позволяющее без изменения габаритных размеров задавать требуемую зависимость усилия на штоке от давления среды в рабочей камере.
Ключевые слова: привод, мембрана, жесткий центр, эффективная площадь.
Sysoev S.N.1, Vozdugan A.A.2
1 ORCID: 0000-0001-8255-9497, PhD in Engineering, professor, 2 ORCID: 0000-0003-1356-0253, Postgraduate student, Vladimir State University
ACTUATOR WITH VARIABLE EFFECTIVE AREA USED ONE MEMBRANE
Abstract
Actuators with functional chamber which limited by membrane connected with rod are analyzed. It's usually used in hydro-pneumatic equipment. It is given increase of functional efficiency by effective membrane’s area size changing in progress of actuator’s function. The article describes new device with effective membrane’s area variable size which allow to set relation with force on rod and ambient pressure without overall dimensions changing.
Keywords: actuator, membrane, hard center, effective area.
В пневмо-и гидроавтоматике широко применяются устройства, в которых рабочая камера ограничена эластичной мембраной, связанной со штоком, выполняющим функцию запорно-регулирующего элемента, например, в клапанах гидропневмоаппаратуры [1]. Клапана способны работать как под повышенным давлением, так и в вакууме. Созданием давления газа или жидкости в рабочей камере получают силовое воздействие на шток и его перемещение.
С момента изобретения промышленного мембранного клапана в оригинальную конструкцию П. K. Саундерса [2] постоянно вносились изменения. Применялись новые материалы, подходящие для гигиенических систем, использовалась иная конфигурация клапана, например, трехходовой клапан, выходной клапан емкости и многоканальный клапан, а также разнообразные устройства автоматизации и управления клапаном для улучшения регулирования [3].
Повышают зависимость силового воздействия от давления путем установки на мембране жесткого центра, увеличивающего эффективную площадь мембраны.
Для мембраны с жестким центром силовое воздействие F определяется произведением давления p на эффективную площадь Sэфф в соответствии с известным выражением [4]:
![]() ,
,
где: R – радиус мембраны; r – радиус жесткого центра.
Величина перемещения штока, силовое воздействие на него в данных устройствах задается перед началом работы в большинстве случаев только величиной давления рабочей среды, что ограничивает функциональные возможности привода и область его применения.
Использование влияния величины эффективной площади мембраны на функционирование привода и ранее рассматривалось в данном контексте в отечественных и зарубежных работах. Например, корректируют рассогласование, обусловленное отклонениями в размерах, характеристик материалов и неточностью сборки, устраняется перемещением центра мембраны относительно плоскости ее заделки. Применяют мембрану, обладающую упругими свойствами, приводящими к изменению ее эффективной площади при воздействии на нее такого перепада давлений, величина которого создает напряжение в материале мембраны, превышающее предел упругости [5]. Однако в данных устройствах отсутствует возможность регулировки, управления в процессе их работы.
Выполнение жесткого центра из составных частей [6, 7], одна из которых перестает взаимодействовать с мембраной при воздействии на нее заданного давления рабочей среды, уменьшая эффективную площадь мембраны, повышает эффективность управления мембранными приводами. Данные технологии и устройства позволяют в процессе работы привода уменьшать зависимость силового воздействия, создаваемого на штоке, от величины давления рабочей среды, действующей на мембрану.
Однако в значительной группе приводных механизмов требуется обеспечить увеличение усилия на штоке в конце его прямого хода, например, для выполнения функции прижатия к седлу запорного органа клапанов гидропневмоаппаратуры. Данная функция реализуется применением дополнительных прижимающих механизмов [8], значительно усложняя конструкцию и систему управления.
Задача расширения функциональных возможностей мембранных приводов путем обеспечения увеличения усилия на штоке в конце его прямого хода без изменения габаритных размеров устройства является актуальной.
Анализ возможности выполнения данной задачи методом исследования функционально-физических связей [9] выявил следующие закономерности.
Свойство изгиба мембраны от давления рабочей среды снижает величину силы на штоке. Увеличение силового воздействия на штоке путем увеличения эффективной площади мембраны достигают установкой на ней жесткого центра, функция которого заключается в устранении процесса изгиба части мембраны, то есть ограничении перемещения мембраны относительно штока. Аналогичную функцию по ограничению перемещения рабочего органа в разнообразных устройствах выполняет жесткий упор. Упор при силовом взаимодействии с мембраной выполнит функцию жесткого центра. Эту функцию упор может выполнять как в начале процесса работы привода, так и позже.
Таким образом, предлагается в мембранном приводе, включающем мембрану, соединенную со штоком, на штоке закрепить упор с возможностью перемещения вдоль него и регулирования расстояния до мембраны.
Пример устройства и этапы его работы представлен на рис.1, а, б, в.
Устройство (рис. 1, а) состоит из корпуса 1 с рабочей камерой 2, ограниченной мембраной 3 с закрепленным на ней штоком 4. На штоке установлен упор 5, зафиксированный ограничителем 6 на расстоянии l от поверхности мембраны.
В исходном положении, когда в рабочей камере манометрическое давление воздуха равно нулю (p = 0), шток занимает исходное положение на расстоянии Х0 от края корпуса.
Подача пневмопитания в рабочую камеру приводит к повышению в ней давления. Возрастает сила, действующая на шток до F1 (рис. 1, б). Шток перемещается на расстояние Х1 от величины давления p1 в рабочей камере. При этом эффективная площадь мембраны остается постоянной, так как мембрана еще не контактирует с упором 5.
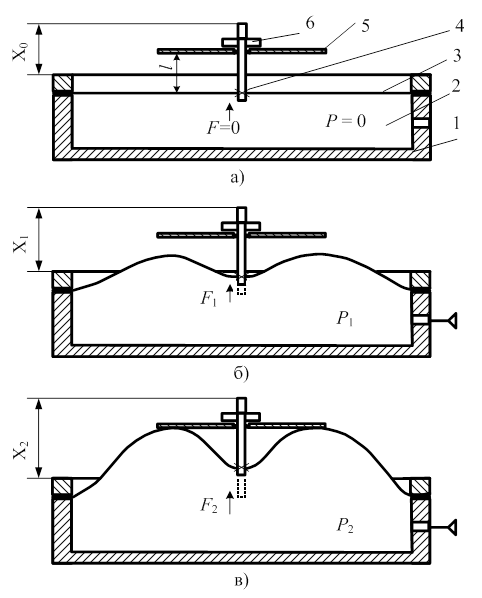
Рис. 1 - Этапы работы мембранного привода
При дальнейшем увеличении давления до p2 (рис. 1, в) в рабочей камере мембрана прогибаясь, входит в контакт с упором. Это приводит к увеличению эффективной площади мембраны, увеличивая силу F1 на штоке до F2.
Снижение величины давления в рабочей камере приводит к размыканию контакта мембраны с упором и уменьшению эффективной площади мембраны, что снижает зависимость силового воздействия на шток от давления.
Сравнительный характер зависимости силового воздействия F на шток от давления p рабочей среды показан на рис. 2.
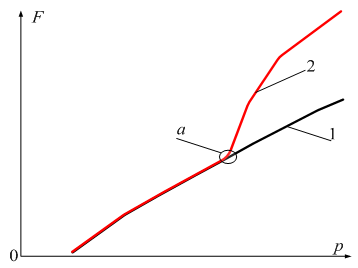
Рис. 2 - Графики характера процесса работы устройства, где: 1 и 2 – графики зависимости силы на штоке от давления рабочей среды соответственно без упора и с ним
Из графика видно, что соприкосновение мембраны с упором (рис. 1, в) в зоне а и дальнейшее увеличение площади контакта с ним, приводит к увеличению силы, создаваемой на штоке устройства.
Таким образом, расширяются функциональные возможности мембранных приводов путем обеспечения увеличения усилия на штоке в конце его прямого хода от величины давления рабочей среды и уменьшения усилия на штоке при обратном его ходе за счет изменения эффективной площади мембраны без изменения габаритных размеров устройства.
В лаборатории СКБ «Поиск» Владимирского государственного университета исследован предлагаемый мембранный привод. Моделирование, макетирование, натурные исследования показали его промышленную применимость и эффективность.
Литература
- Башта Т. М. Гидропривод и гидропневмоавтоматика. М., «Машиностроение», 1972, 320 с.
- Source: www.centuryinstrument.com/history.htm.
- Jones, Steve.“The Future of Valves and Diaphragms Supply.”BioPharm International, May 1, 2013, pp. 32–33. 4.
- Сысоев С.Н. Элементы гидравлического и пневматического оборудования: Учеб. пособие / Владим. гос. ун-т; Владимир, 2001.– 90 с.
- А.с. 26959I СССР. МКИ3 F15C 5/00, G06d 1/02 Способ регулировки эффективной площади мембран в устройствах пневмо-и гидроавтоматики / Л.А. Балховитин, В.М. Зорин, А.Д. Сосновский; опубл. 01.01. 1970, №15
- Пат. 116846 Российская Федерация, МПК3 B 66 C 1/54. Камерный захватный агрегатный модуль / Сысоев С.Н., Никитин Р.А., Федотов А.В. –№ 2011154231/11; заявл. 28.12.2011; опубл. 10.06.2012, бюлл. № 16.
- Сысоев, С.Н. Камерный захватный агрегатный модуль для транспортировки бухты медной трубки упорядоченной намотки / С.Н. Сысоев, Р.А. Никитин, А.В. Федотов // Заготовительные производства в машиностроении.–2013.–№3.– С. 35-37.
- А.с. 427206 СССР. МКИ3 F16K 31/145 Исполнительный механизм / Л.С. Бондарчук, П.А. Жунев, М.С. Слободкин; опубл. 05.05. 1974, №17
- Сысоев, С.Н. Принципы и методы нахождения технических решений. Метод исследования функционально-физических связей / С.Н. Сысоев. – Владимир: Изд-во Владим. гос.ун-та, 2007. – 214 с. ISBN 5-89368-775-2.
References
- Bashta T. M. Gidroprivod i gidropnevmoavtomatika. M., «Mashinostroenie», 1972, 320 s.
- Source: www.centuryinstrument.com/history.htm.
- Jones, Steve.“The Future of Valves and Diaphragms Supply.”BioPharm International, May 1, 2013, pp. 32-33. 4.
- Sysoev S.N. Jelementy gidravlicheskogo i pnevmaticheskogo oborudovanija: Ucheb. posobie / Vladim. gos. un-t; Vladimir, 2001.– 90 s.
- A.s. 26959I SSSR. MKI3 F15C 5/00, G06d 1/02 Sposob regulirovki jeffektivnoj ploshhadi membran v ustrojstvah pnevmo-i gidroavtomatiki / L.A. Balhovitin, V.M. Zorin, A.D. Sosnovskij; opubl. 01.01. 1970, №15
- Pat. 116846 Rossijskaja Federacija, MPK3 B 66 C 1/54. Kamernyj zahvatnyj agregatnyj modul' / Sysoev S.N., Nikitin R.A., Fedotov A.V. –№ 2011154231/11; zajavl. 28.12.2011; opubl. 10.06.2012, bjull. № 16.
- Sysoev, S.N. Kamernyj zahvatnyj agregatnyj modul' dlja transportirovki buhty mednoj trubki uporjadochennoj namotki / S.N. Sysoev, R.A. Nikitin, A.V. Fedotov // Zagotovitel'nye proizvodstva v mashinostroenii.–2013.–№3.– S.35-37.
- A.s. 427206 SSSR. MKI3 F16K 31/145 Ispolnitel'nyj mehanizm / L.S. Bondarchuk, P.A. Zhunev, M.S. Slobodkin; opubl. 05.05. 1974, №17
- Sysoev, S.N. Principy i metody nahozhdenija tehnicheskih reshenij. Metod issledovanija funkcional'no-fizicheskih svjazej / S.N. Sysoev. – Vladimir: Izd-vo Vladim. gos.un-ta, 2007. – 214 s.