МОДЕЛЬ УСИЛИТЕЛЯ ПОСТОЯННОГО ТОКА С ЦИФРОВЫМ УПРАВЛЕНИЕМ В СРЕДЕ SIMINTECH
МОДЕЛЬ УСИЛИТЕЛЯ ПОСТОЯННОГО ТОКА С ЦИФРОВЫМ УПРАВЛЕНИЕМ В СРЕДЕ SIMINTECH
Научная статья
ORCID: 0000-0003-0375-904X;
Тихоокеанский государственный университет, Хабаровск, Россия
* Корреспондирующий автор (001149[at]pnu.edu.ru)
АннотацияВ статье исследована возможность построения модели малошумящего усилительного каскада постоянного тока с микроконтроллерным управляющим модулем в среде моделирования SimInTech. Особенностью рассмотренного принципа построения является комбинация встроенных блоков среды SimInTech и собственных компонентов, выполненных в виде программных модулей. Усилительный каскад реализован в виде аналитической модели с учетом частотных свойств. Модель управляющего микроконтроллера выполнена в виде программного блока, что дает возможность реализации и отладки встроенных алгоритмов управления усилительным каскадом с последующей генерацией кода на языке Си. Взаимосвязь аналоговой и цифровой частей модели организована с помощью прямой привязки параметров. Приведен пример моделирования алгоритма управляющего микроконтроллера для реализации триггерной защиты электронных цифровых потенциометров обратной связи.
Ключевые слова: малошумящий усилитель постоянного тока, электронный цифровой потенциометр, моделирование.
A MODEL OF A DIGITALLY CONTROLLED DC AMPLIFIER IN SIMINTECH
Research article
Ivanov V.E.*
ORCID: 0000-0003-0375-904X;
Pacific National University, Khabarovsk, Russia
* Corresponding author (001149[at]pnu.edu.ru)
AbstractThe article investigates the possibility of constructing a model of a low-noise DC amplifier stage with a microcontroller control module in a SimInTech simulation environment. A feature of the construction principle under study is a combination of built-in blocks of the SimInTech environment and proprietary components made in the form of software modules. The amplifying cascade is implemented in the form of an analytical model taking into account frequency properties. The model of the control microcontroller is made in the form of a program block, which makes it possible to implement and debug the built-in algorithms for controlling the amplifier stage with subsequent code generation in C. The relationship between the analog and digital parts of the model is organized using direct parameter binding. The study provides an example of modeling the algorithm of a control microcontroller for implementing trigger protection of electronic digital feedback potentiometers.
Keywords: low-noise DC amplifier, electronic digital potentiometer, simulation.
ВведениеМалошумящие усилители постоянного тока (МШУ ПТ) находят применения во многих приложениях современной электроники. Помимо встроенных систем, где их применение связано с усилением слабых низкочастотных сигналов, они используются в составе измерительных систем и комплексов, предназначенных для исследования фликкер-шумовых процессов в полупроводниковых и иных проводящих средах. Основной проблемой реализации МШУ ПТ является наличие дрейфа, обусловленного собственными фликкер-шумами первого каскада. Кроме этого, разработчики сталкиваются с технической проблемой начальной балансировки усилительного тракта. В работах [1], [2] описаны схемотехнические решения, на основе электронных цифровых потенциометров [3], [4], с помощью которых возможна как начальная балансировка усилительного каскада, так и компенсация собственного дрейфа. Такое решение является оптимальным только в том случае, когда усилительный каскад имеет либо внешнее управление, либо оснащен встроенной системой управления на базе микроконтроллера. Альтернативой являются решения на базе усилителей с нулевым дрейфом, однако в этом случае остается открытым вопрос начальной балансировки каскада. Введение в состав усилительного каскада управляющего микроконтроллера (MCU) с измерением входного и выходного напряжения каскада позволяет потенциально реализовать встроенные алгоритмы автоматической компенсации смещения, что косвенным образом решает и проблему частичного подавления фликкер-шума в заданных полосах частот. Наличие управляющего микроконтроллера в составе усилительного каскада открывает широкие возможности для расширения функциональности каскада и улучшения его характеристик. Кроме этого, как показано в [1], [2], МШУ ПТ с интегрированным MCU может являться основой для построения многокаскадных измерительных трактов на постоянном токе. В этом случае возможны более сложные алгоритмы управления не только отдельными каскадами, но и измерительным трактом в целом [5].
Основной целью моделирования усилительного каскада и его системы управления является отработка встроенных алгоритмов, реализованных на базе MCU, таких как:
1) алгоритм автоматической защиты электронных потенциометров обратной связи;
2) алгоритм начальной балансировки усилительного каскада для компенсации смещения;
3) алгоритм начальной балансировки многокаскадного измерительного тракта;
4) алгоритм автоматической компенсации дрейфа и снижения уровня собственных фликкер-шумов (повышение чувствительности).
Аналитическая модель усилительного каскада
Основой усилителя постоянного тока является каскад на базе малошумящего операционного усилителя (AD797, OP37, AD795 и др.). Аналитические зависимости, устанавливающие соответствие между входным и выходным напряжением достаточно просты, однако необходимость моделирования обусловлена тем, что эти величины при согласовании с управляющим микроконтроллером проходят через стадию дискретизации по времени и уровню. Кроме этого, необходимо учитывать частотные свойства ОУ, ограничения по уровню, связанного с динамическим диапазоном усилителя, погрешности, связанные с шумом АЦП, временные задержки, связанные с конечной частотой тактирования MCU.
На рисунке 1 приведена упрощенная функциональная схема усилителя с управляющим микроконтроллером.
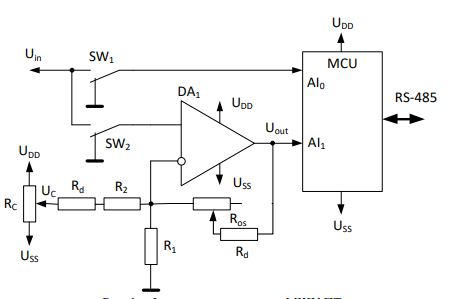
Рис. 1 – Функциональная схема МШУ ПТ
Выходное напряжение Uoutзависит от величины входного напряжения Uin, напряжения смещения Uc и коэффициента усиления, зависящего от R1 и Ros. В свою очередь, Ros и Ucпредставляют собой величины, квантованные по уровню и времени, так как их значения зависят от управляющего кода для цифровых потенциометров Rc и Ros(DP1 и DP2 соответственно). Таким образом, при статически заданных значениях Ros и Uc, напряжение Uout представляет собой непрерывную величину, а при изменении Ros и Uc величина Uoutскладывается из непрерывной и дискретной составляющих. Основное уравнение усилителя, связывающее все перечисленные выше параметры, описывается формулой (1):
 |
(1) |
где Rfbn- номинальное значение потенциометра DP2(Ом); Nfb, Nc – управляющие коды потенциометров (0-255); R1 – величина резистора R1 (Ом); Vdd, Vss – напряжение питания делителя Rc (В) по отношению к сигнальному общему проводу. Измеренное микроконтроллером значение Uoutможно определить по формуле (2):
 |
(2) |
Подобным образом производится расчет Uinпри замкнутом ключе SW1, который замыкается только при измерении входного напряжения для минимизации наводок цифровой схемы управления. Для компенсации входного смещения целесообразно рассчитать такое значение Ninmax, которое можно скомпенсировать за счет DP1. Такое значение для одного знака входного напряжение определяется по простой формуле (3):
 |
(3) |
где Rfb – текущее значение сопротивления DP2. При этом компенсацией считается потенциальная возможность установления нулевого напряжения на выходе усилителя во всем диапазоне управляющего кода DP1. Это значение приведено для одной симметричной области относительно величины нуля АЦП (512). Более подробно аналитическая модель описана в [2], где приведены более детальные зависимости параметров друг от друга. В частности, величина Uc в общем случае нелинейно зависит от величины управляющего кода Nc, так как рассчитывается по формулам нагруженного делителя напряжения Rc-R2-Rd-R1, что необходимо учитывать при расчете величины смещения.
Схема модели общего вида
Приведенная выше аналитическая модель УУКЦУ может быть реализована в любой известной системе моделирования, в качестве которой выбран пакет SimInTech, [7], [8] обладающий рядом преимуществ:
- Высокое быстродействие, позволяющее реализовать модель, работающую в реальном времени;
- Модельно-ориентированное проектирование систем [9], c возможностью интеграции различных решателей в единую систему через общую базу сигналов;
- Возможность комбинации типовых библиотечных элементов и собственных функций;
- Возможность реализации прямых связей переменных в разных объектах, что значительно упрощает процесс построения модели;
- Возможность создания бланка свойств объекта, которые могут быть как статическими (константы) так и динамическими (свойство, заданное по умолчанию, может быть изменено в реальном времени);
- Возможность создания собственных элементов управления и отображения с необходимыми свойствами.
- Возможность генерации кода на языке Си для встроенных систем.
Имитационная модель усилителя приведена на рисунке 2.
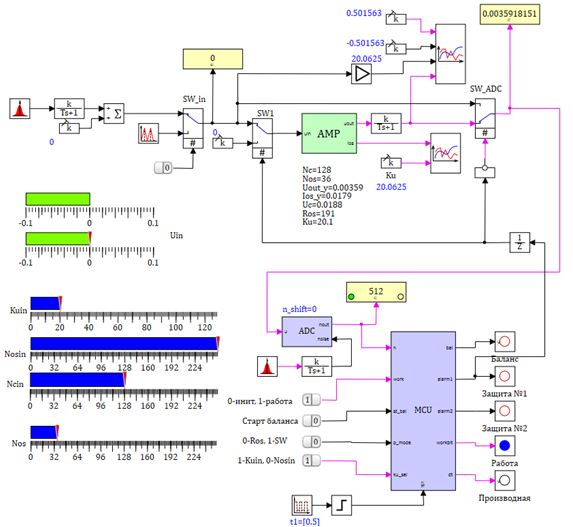
Рис. 2 – Схема модели общего вида
Модель логически разделена на две субмодели – модель усилительного каскада с аналоговым представлением сигналов и модель микроконтроллера с встроенными алгоритмами. Для моделирования использован единый решатель «модель общего вида», так как в отличие от задачи, описанной в [10], комбинировать различные представления нет необходимости. Модель усилительного каскада, в свою очередь, представлена модулем «AMP» устанавливающая аналитическую зависимость между входным и выходным напряжением, моделями аналоговых ключей SW1 и SW2, а также элементами имитации входного сигнала. Динамическая составляющая модели представлена звеном первого порядка. Модель микроконтроллера представлена блоком «MCU» содержащим набор встроенных алгоритмов управления, блоком 2-х канального 10-разрядного АЦП, а также вспомогательными элементами индикации и управления.
Для взаимосвязи моделей применены следующие принципы. Для наглядности представления пути распространения основного сигнала (выходное напряжение усилителя) применены непосредственные математические связи с отображением значимых параметров на графиках. Логические связи между усилителем и контроллером организуются с помощью прямой привязки свойств обоих субмоделей. Для задания параметров моделей в режиме разработчика среды SimInTech созданы наборы свойств, часть которых являются статическими (настройки). Кроме этого, используются динамические свойства (параметры), предназначенные для создания привязок субмоделей друг к другу, а также для визуализации текущих значений в виде списков.
Взаимосвязь субмоделей AMP и MCU организована следующим образом. В модуле AMP задаются в виде свойств величины резисторов R1, R2 и номинальные значения потенциометров смещения и коэффициента усиления. Эти значения передаются в модуль MCU методом прямой привязки для реализации в МСU защитных алгоритмов и алгоритмов компенсации. Такие логические связи иллюстрируют наличие в ПЗУ MCU значений, задаваемых пользователем (рисунок 3). Для расчета выходного напряжения в модуле AMP контроллер передает в этот модуль параметр Nos – величину кода, соответствующую установленному значению Ros.
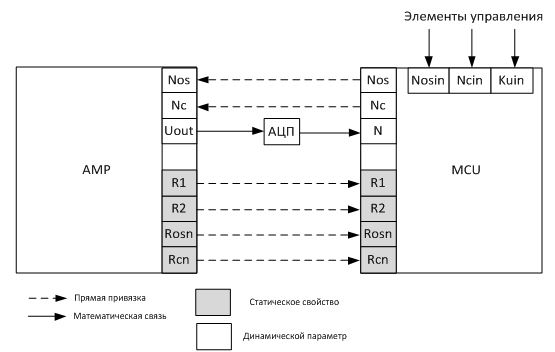
Рис. 3 – Структура логических связей модели
Для этой же цели в усилитель передается значение кода смещения Nc. По результатам расчета усилитель передает в MCU значение выходного напряжения, которое преобразуется в цифровой код посредством отдельной субмодели АЦП. Для начальной настройки параметров каскада в модуль MCU с внешних органов управления передаются значения параметров Nosin, Kuin (коэффициент усиления, заданный двумя способами) и Ncin (код смещения).
Модель усилительного каскада
Модель усилителя реализована в виде блока «Язык программирования» из библиотеки «Динамические». С целью структуризации модели в свойства блока добавлены переменные, используемые ранее в формулах (1-3). В модуле AMP производится расчет выходного напряжения в зависимости от входного напряжения, значения кода потенциометра смещения Nc и значения кода резистора обратной связи Nos. Бланк свойств и параметров модели приведен на рисунке 4. Ряд параметров представлен статическими свойствами. Результирующими параметрами являются выходное напряжение каскада и величина тока через Ros (данный параметр используется для контроля работы защиты DP2, описанный ниже). Кроме этого, для наглядного представления выведены параметры Ku и Ros.
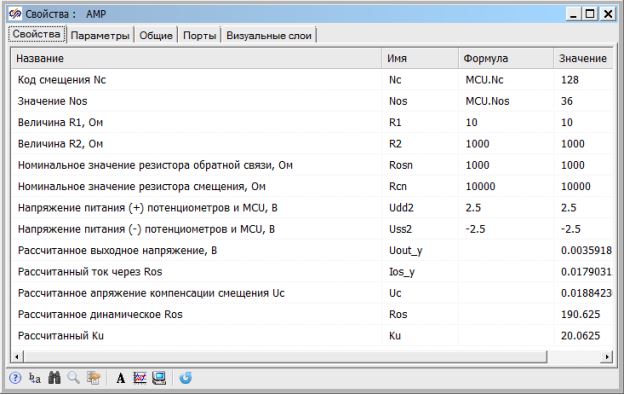
Рис. 4 – Бланк параметров модуля «AMP»
В расчете участвуют основные параметры каскада, включая номиналы резисторов R1, R2 и Rosn (номинальное значение ЭЦП обратной связи) и Rcn (номинальное значение ЭЦП смещения). Сигнал на вход усилителя подается через аналоговый коммутатор, с помощью которого задается входное напряжение от двух различных источников. Входной сигнал искусственно зашумляется источником Гауссовского белого шума, отфильтрованного звеном первого порядка. Коэффициент усиления звена определяет соотношение амплитуд шума и входного сигнала, задавая, таким образом, степень зашумления.
Модель управляющего микроконтроллера
Управляющий микроконтроллер представлен блоком MCU (алгоритмы управления), моделью 10-разрядного АЦП с аналоговым коммутатором входов «SW_ADC», управление которым производится по команде соответствующего алгоритма. Так как значение кода АЦП и положение ключа связаны посредством алгоритмической обработки и образуют причинно-следственную связь, для разделения расчета и устранения перекрестной ссылки введен элемент запаздывания с нулевой константой времени. Блок «Тактовый генератор», имитирует тактовую частоту МСU (фактически – задержку работы основного цикла MCU). С помощью двухканального коммутатора производится попеременное измерение либо входного, либо выходного напряжения усилителя. Такой вариант моделирования допустим, так как основой для работы всех алгоритмов является величина Uout, тогда как напряжение Uin контролируется только в случае срабатывания защиты от перегрузки ЭЦП, где информация о величине Uout не имеет смысла. Для более удобного ввода параметров использован прямой и обратный пересчет коэффициента усиления из величины 0-255 в инженерные единицы (переменная «Заданный Ku»). Направление пересчета задается положением дискретного переключателя «ku_sel», позволяя пользователю вводить значение Ku двумя способами, с сопутствующим расчетом обратной величины. Бланк свойств модели приведен на рисунке 5.
Модель контроллера может функционировать в двух режимах. В режиме инициализации («work»=FALSE) основной цикл контроллера остановлен, игнорируются алгоритмы защиты и привязка к тактовой частоте. В этом режиме активен ввод основных параметров усилителя – Nosin, Kuin и Ncin, что равносильно заданию параметров со стороны пользователя. Таким образом, реализуется аналитической расчет модели и визуализация ее статических параметров в реальном времени.
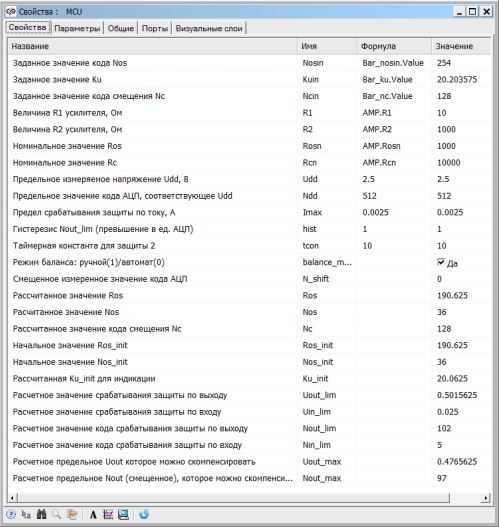
Рис. 5 – Бланк параметров микроконтроллера
В динамическом режиме («work»=TRUE) все заданные значения резервируются и сохраняются в виде стартовых настроек и присваиваются фактическим параметрам, при этом фактическое параметры могут изменять свое значение под управлением встроенных алгоритмов. В этом режиме осуществляется выполнение рабочего цикла MCU с динамическим изменением и визуализацией параметров в привязке к тактовой частоте. При возврате к режиму инициализации все динамические параметры возвращаются к стартовым значениям. Для более удобной отладки, модельное время и величины постоянных времени (в том числе – и тактовая частота MCU) искусственно смещены на величину 104, что позволяет наблюдать за процессом работы в реальном времени без существенных затрат ресурсов. Для данной модели выбран фиксированный шаг интегрирования для метода Эйлера Δt=0.001 c, при этом минимальное значение постоянной времени 0.01 с, что обеспечивает достаточную точность расчета (1/100). Постоянная времени RC-цепи, установленная на выходе усилителя, и представленная звеном первого порядка, имеет значение 105, обеспечивая подавление высших гармоник сигнала на частотах выше 15 кГц. Это значение является критичным, так как от его значения зависит степень подавления побочных гармоник, связанных с нулевыми биениями на тактовой частоте фильтра с системы сбора данных.
Тактовая частота MCU определяется временем выполнения основного цикла контролера, которое складывается из величины времени преобразования АЦП (около 12 мкс), и приблизительным временем выполнения операций цикла (около 40 мкс).
Модуль АЦП также реализован на программном уровне с использованием вспомогательных элементов. Так как АЦП реализован как универсальный, пользователь задает его динамический диапазон в инженерных единицах и разрядность. В привязке к реальным условиям разрядность АЦП составляет n=10,а динамический диапазон ±2.5 В. Выходным параметром является значение кода, представленное типом данных «Word», а дополнительным параметром – значение выходного кода со смещением на величину половины диапазона.
Моделирование алгоритма защиты
Необходимость защиты ЭЦП обратной связи возникает в том случае, когда ток через потенциометр превышает некоторое предельное значение (обычно <5 мА), что приводит, в зависимости от величины тока, либо к выходу его из строя, либо к постепенной деградации. Очевидно, что такая ситуация возможна в том случае, когда значение коэффициента усиления близко к минимальному, и величина R1 составляет единицы Ом. Такая ситуация в целом актуальна для первых каскадов усилительного тракта, где минимальное значение R1 выбирается для минимизации шумов каскада в целом. Очевидно, что существует некоторое предельное значение Uout, выше которого (по модулю) наблюдается проход сквозного тока через ЭЦП за границу установленного значения. Такая ситуация возможна при насыщении предыдущего каскада, при выходе входного напряжения за допустимые границы и при обрыве источника сигнала. Последняя ситуация встречается наиболее часто и приводит, как правило, к немедленному выходу из строя DP2. Для проверки адекватности модели реализован защитный триггерный механизм, предотвращающий выход сквозного тока через DP2 за границы диапазона за счет отключения источника сигнала от входа усилителя и замыкание входа последнего на нулевой сигнальный уровень. Такой способ требует введения ключа SW2 (см. рисунок 1), однако похожая процедура может быть использована при реализации алгоритма компенсации собственного дрейфа.
Для реализации процедуры срабатывания необходимо измеренное значение Nout и ранее рассчитанное значение Noutlim, зависящее от нескольких параметров каскада, в том числе – от коэффициента усиления, значения R1 напряжения питания каскада и величины предельного тока [6]. Для реализации возврата в рабочий режим требуется предварительно рассчитанное значение Ninlim, зависящее только от величины R1 [2]. Защита реализуется в основном цикле MCU. При этом в цикле опрашивается значение входного кода и сравнивается с предварительно рассчитанным значением Noutlim. Если условие истинно, включается выход «alarm1», который управляет ключом SW1, отключая, таким образом, источник сигнала от входа AMP. Так как в этом режиме АЦП измеряет входное напряжения, то выходной код, ему соответствующий, сравнивается с Ninlim. Если N<Ninlim, защита отключается.
Для проверки реализованного на встроенном языке SimInTech алгоритма защиты использованы следующие параметры усилительного каскада: напряжение питания – 2.5 В; R1=10 Ом; R2=10000 Ом; номинальное значение Ros- 1 кОм, номинальное значение Rc– 10 кОм; разрядность АЦП – 10. При таких параметрах усилитель обладает минимальным уровнем шума (за исключением фликкер-шума). Для таких условий в статическом режиме Uoutlim=0.502 В, Uinlim=0.025 В, Noutlim=102, Ninlim=5. Значение тока при выходе усилителя в режим насыщения может превышать 15 мА, что является запредельным значением. На рисунке 6 приведены графики входного и выходного напряжения при плавном нарастании входного напряжения.
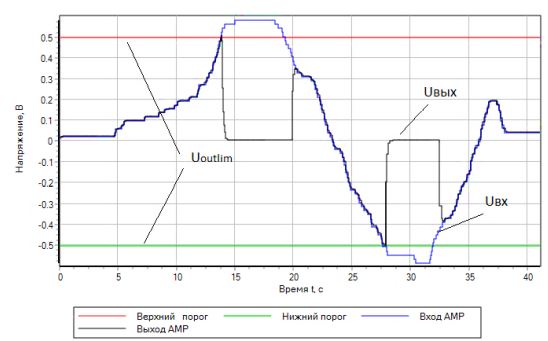
Рис. 6 – Моделирование алгоритма защиты при плавном изменении входного напряжения
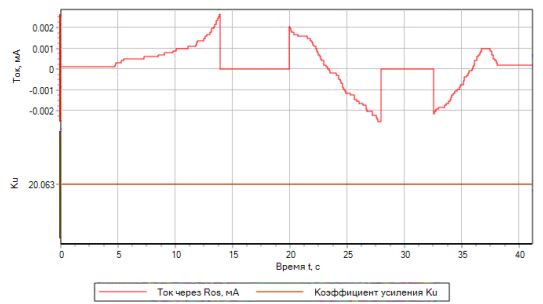
Рис. 7 – Расчетное значение величины сквозного тока и коэффициента усиления
Как видно из рисунков (6), (7), срабатывание защиты происходит при превышении напряжения заданного порога, как для положительного, так и для отрицательного значения. При этом запаздывание минимально и не приводит к превышению тока за границу 2.5 мА (рисунок 7). При возврате входного напряжения в рабочий интервал происходит штатное отключение аварийного режиме на величине напряжения около 0.36 В, что объясняется заданным гистерезисом в два двоичных разряда по входному напряжению.
Основные результаты
Приведенный вариант реализации модели усилительного каскада с микропроцессорным управлением среде SimInTech максимально приближен к аппаратной реализации для тех особенностей каскада, которые являются ключевыми для разработки встроенных алгоритмов. В частности, реализован учет нелинейности формирования напряжения смещения, учет частотных свойств усилителя, и учет тактовой частоты микроконтроллера, влияющих на величину запаздывания контура управления. Результаты моделирования МШУ ПТ в статическом режиме показывают, что модель реализована в полном соответствии с аналитическими зависимостями. Пример реализации триггерной защиты показывает, что на основе разработанной SimInTech-модели возможна отработка комплекса встроенных алгоритмов, в том числе и для многокаскадных измерительных трактов.
| Финансирование | Funding |
| Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 20-08-00163. | The study was carried out with the financial support of the Russian Foundation for Basic Research within the framework of the scientific project No. 20-08-00163. |
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
- Иванов В. Э. Малошумящий программируемый усилитель постоянного тока с дистанционным управлением / В. Э. Иванов, Ен Ун Чье // Известия высших учебных заведений России. Радиоэлектроника. – 2019. – № 22(4). – С. 99–108.
- Иванов В. Э. Аналитическая модель усилителя постоянного тока с цифровым управлением / В. Э. Иванов // Информационные технологии XXI века : сборник научных трудов. – Хабаровск : Изд-во Тихоокеан. гос. унта. – 2021. – C. 70–76.
- Ридико Л. Цифровые потенциометры / Л. Ридико //Компоненты и технологии. – 2001. – № 5. – С. 1–6.
- Андрусевич А. Управление потенциалом. Цифровые потенциометры Maxim/Dallas / А. Андрусевич //Новости электроники. – 2006. – №15. – С. 3–7.
- Ivanov V. E. Iterative Balancing Algorithm for Multistage DC Amplifiers / V.E. Ivanov, En Un Chye // 2021 Siberian Conference on Control and Communications (SIBCON) / Proceedings. Kazan Federal University, Kazan, Russia, May 13–15. – 2021.
- MerinoM. U. Insight Into Digipot Specifications and Architecture Enhances AC Performance. / Merino Usach, Miguel //Analog Dialogue. – Vol. 45. – 2011. – № 3. [Electronic resource]. URL: https://www.analog.com/ru/analog-dialogue/articles/digipot-specifications-and-architecture.html (accessed: 24.01.2022)
- Калачев Ю. Н. Преобразователи автономных источников электроэнергии / Ю. Н. Калачев, А. Г. Александров. – М. : ДМК Пресс. – 2021. – 80 с.
- Карташов Б. А. Среда динамического моделирования технических систем / Б.А. Карташов, Е. А. Шабаев, О.С. Козлов и др. – М. : ДМК Пресс. – 2017. – 424 с.
- Щекатуров А. М. Методика моделирования динамики паротурбинной установки ТК-35/38-3,4 на базе кода HS / А. М. Щекатуров, А. Р. Корсаков. – М. : ДМК Пресс, 2022. – 242 с.
- Воротников И. Н. Моделирование измерительных схем емкостных датчиков в среде SimInTech / И.Н. Воротников, М. А. Мастепаненко, Ж. Ш. Габриелян и др. // Измерения. Мониторинг. Управление. Контроль. – 2021. –№ 3.– С. 48–53.
Список литературы на английском языке / References in English
- Ivanov V. Je. Maloshumjashhij programmiruemyj usilitel' postojannogo toka s distancionnym upravleniem [Low Noise Programmable DC Amplifier with Remote Control] / V. E. Ivanov, En Un Chye // Izvestija vysshih uchebnyh zavedenij Rossii. Radiojelektronika [News of higher educational institutions of Russia. Radio electronics]. – 2019. – № 22(4). – P. 99–108. [in Russian]
- Ivanov V. E. Analiticheskaja model' usilitelja postojannogo toka s cifrovym upravleniem [Analytical model of a digitally controlled DC amplifier] / V. E. Ivanov // Informacionnye tehnologii XXI veka : sbornik nauchnyh trudov [Information technologies of the XXI century: a collection of scientific papers]. –Khabarovsk: Pacific Publishing. state university. – 2021. – P. 70–76. [in Russian]
- Ridiko L. Cifrovye potenciometry [ Digital potentiometers] / L. Ridiko // Komponenty i tehnologii [Components and technologies]. – 2001. – № 5. – P. 1–6. [in Russian]
- Andrusevich A. Upravlenie potencialom. Cifrovye potenciometry Maxim/Dallas [Digital potentiometers Maxim/Dallas] / A. Andrusevich // Novosti jelektroniki [News of electronics]. – 2006. – №15. – P. 3–7. [in Russian].
- Ivanov V. E. Iterative Balancing Algorithm for Multistage DC Amplifiers / V.E. Ivanov, En Un Chye // 2021 Siberian Conference on Control and Communications (SIBCON) / Proceedings. Kazan Federal University, Kazan, Russia, May 13–15. – 2021.
- Merino M. U. Insight Into Digipot Specifications and Architecture Enhances AC Performance. / Merino Usach, Miguel // Analog Dialogue. – Vol. 45. – 2011. – № 3. [Electronic resource]. URL: https://www.analog.com/ru/analog-dialogue/articles/digipot-specifications-and-architecture.html (accessed: 24.01.2022)
- Kalachev Ju. N. Preobrazovateli avtonomnyh istochnikov jelektrojenergii [Converters of autonomous power sources] / Yu. N. Kalachev, A. G. Alexandrov. – M. : DMK Press. – 2021. – 80 p. [in Russian].
- Kartashov B. A. Sreda dinamicheskogo modelirovanija tehnicheskih system [Environment for dynamic modeling of technical systems] / B. A. Kartashov, E. A. Shabaev, O. S. Kozlov et al. – M. : DMK Press. – 2017. – 424 p. [in Russian]
- Shhekaturov A. M. Metodika modelirovanija dinamiki paroturbinnoj ustanovki TK-35/38-3,4 na baze koda HS [Methodology for modeling the dynamics of a steam turbine plant TK-35/38-3,4 based on the HS code] / A. M. Shchekaturov, A. R. Korsakov. – M. : DMK Press, 2022. – 242 p. [in Russian]
- Vorotnikov I. N. Modelirovanie izmeritel'nyh shem emkostnyh datchikov v srede SimInTech [Modeling of measuring circuits of capacitive sensors in the SimInTech environment] / I.N. Vorotnikov, M.A. Mastepanenko, Zh. Sh. Gabrielyan, et al. // Izmerenija. Monitoring. Upravlenie. Kontrol' [Measurements. Monitoring. Control]. – 2021. –№ 3.– P. 48–53. [inRussian]