МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВОЗДЕЙСТВИЯ ДВИЖИТЕЛЯ НА УПЛОТНЯЮЩИЙСЯ ЛЕСНОЙ ПОЧВОГРУНТ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВОЗДЕЙСТВИЯ ДВИЖИТЕЛЯ НА УПЛОТНЯЮЩИЙСЯ ЛЕСНОЙ ПОЧВОГРУНТ
Научная статья
Андронов А.В.1, *, Котенев Е.В.2, Пегов В.Ю.3
1, 2, 3 Санкт-Петербургский государственный лесотехнический университет имени С.М. Кирова,
Санкт-Петербург, Россия
* Корреспондирующий автор (andronovalexandr[at]gmail.com)
АннотацияПредлагаемая статья направлена на разработку математической модели процесса взаимодействия движителя машины с грунтом, свойства которого изменяются непосредственно в процессе взаимодействия. Базой для исследования служат положения теории движения автомобильного транспорта в условиях бездорожья, математический анализ. Основой математической модели является схема взаимодействия штампа-движителя и деформируемого массива грунта ограниченной толщины, размещенного на жестком недеформируемом основании. При разработке модели использована степенная зависимость модуля деформации от плотности грунта, изменяющейся под воздействием штампа-движителя вслед за относительной деформацией сжатия массива грунта. Решение уравнения для осадки штампа получено в виде полиномов Тейлора, это позволяет получить расчетное значение глубины колеи не прибегая к итерациям, что упрощает разработку автоматизированных рабочих мест, предназначенных для оценки показателей взаимодействия техники с грунтами лесосек на стадии планирования технологического процесса заготовки древесины. На примере взаимодействия движителей лесных машин со слабыми лесными грунтами показано, расчетные значения глубины колеи, полученные с использованием предлагаемой математической модели, заметно отличаются от значений, полученных расчетом при постоянном значении модуля деформации. Так, при давлении в диапазоне 0,06-0,1 МПа, характерном для взаимодействия колесных движителей лесных машин с грунтом, прогнозируемые значения глубины колеи ниже на 30-60 %. В заключении отмечаются перспективные направления дальнейших разработок, заключающиеся в исследование изменения физико-механических свойств грунта, характеризующих сопротивление грунтов сдвигу и разработке математических моделей, учитывающих потерю несущей способности грунта, расчетное значение которой также изменяется при уплотнении.
Ключевые слова: лесные машины, грунт, математический анализ, деформация, глубина колеи, упрочнение грунта, заготовка древесины.
MATHEMATICAL MODEL OF THE IMPACT OF THE PROPELLING DEVICE ON THICKENING FOREST SOIL
Research article
Andronov A.V.1, *, Kotenev E.V.2, Pegov V.Yu.3
1, 2, 3 St. Petersburg State Forestry University named after S.M. Kirov, St. Petersburg, Russia
* Corresponding author (andronovalexandr[at]gmail.com)
AbstractThe goal of the presented article is to develop the mathematical model of the interaction process between a track mover of a machine and a ground, its properties change directly during the interaction. The provisions of the theory of road transport movement under off-road conditions are the basis for the study, and mathematical analysis. The basis of the mathematical model is the interaction scheme between the track mover and the deformable soil massif of limited thickness placed on a rigid non-deformable base. When developing the model, the authors used a power-law dependence of the deformation modulus on the density of the soil, changing under the influence of the mover stamp following the relative compression of the soil mass. The solution of the equation for stamp precipitation is obtained in the form of Taylor polynomials, this allows to obtain the calculated value of the track depth without resorting to iterations, which simplifies the development of automated workplaces designed to estimate the indicators of the interaction of equipment with the cutting areas at the stage of wood harvesting. On the example of the interaction of thrusters of forest machines with weak forest soils it is shown that the calculated values of the depth of the gauge, obtained with the use of proposed mathematical model, differ markedly from the values obtained by calculation at a constant value of the deformation modulus. So, having a pressure within the range of 0.06-0.1 MPa, which is characteristic of the interaction of wheeled movers of forest machines with the ground, the predicted values of the track depth are lower by 30-60%. In conclusion, promising areas for further development are noted, consisting in the study of changes in the physical and mechanical properties of the soil, which characterize the resistance of soils to shear and the development of mathematical models that take into account the loss of bearing capacity of the soil, the calculated value of which also changes during compaction.
Keywords: forest machines, soil, mathematical analysis, deformation, track depth, soil strengthening, timber harvesting.
Введение
Изучение показателей взаимодействия движителей лесных машин с грунтами – актуальная область исследований в науке о лесозаготовительном производстве. Под воздействием движителей колесных и гусеничных машин грунты уплотняются, происходит формирование колеи, глубина которой является одним из показателей оценки экологичности технологии заготовки древесины [1]. Кроме того, на базе результатов исследования колееобразования проводится оценка тягово-сцепных свойств движителей и проходимости машин [2], [3]. При уплотнении свойства грунтов изменяются, происходит упрочнение массива грунта. Это явление до настоящего времени не получило законченного научного описания.
Цель настоящей статьи – представить математическую модель процесса взаимодействия движителя машины с грунтом, свойства которого изменяются непосредственно в процессе взаимодействия.
Методы исследования – положения теории движения автомобильного транспорта в условиях бездорожья, математический анализ.
Результаты исследования. При разработке математической модели будем считать движитель штампом, воздействующим на деформируемый массив грунта ограниченной толщины, размещенный на жестком недеформируемом основании, по аналогии с [4], [5], [6]. Для этого используется расчетная схема, представленная на рисунке 1.
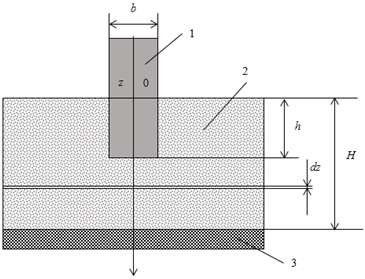
Рис. 1 – Схема к построению математической модели взаимодействия движителя с упрочняющимся грунтом: 1 – движитель машины, 2 – деформируемый грунт, 3 – жесткое (недеформируемое) основание
Сжатие элементарного слоя массива грунта определяется по формуле Я.С. Агейкина [7], [8]:где ε – относительная деформация элементарного слоя грунта, z – координата, отсчитываемая от площадки контакта движителя с грунтом.
Суммарная деформация сжатия массива грунта находится по формуле [7], [8]:
 (4)
(4)
где J – коэффициент учета геометрических параметров пятна контакта движителя с опорной поверхностью, p – среднее давление движителя по поверхности пятна контакта, a – коэффициент учета толщины деформируемого массива грунта, B – ширина пятна контакта движителя с опорной поверхностью.
Модуль деформации в формуле (3), как правило, считается постоянной величиной, не зависящей от σ, ε [4], [5], [6].Необходимо учесть изменение модуля деформации E при уплотнении. В геометрической интерпретации зависимости «напряжение-сжатие» модуль деформации E представляет собой тангенс угла наклона касательной к графику напряжения σ от деформации ε. Тогда при нелинейной функции σ(ε) «мгновенный» модуль деформации E определяется, как:
![]() (5)
(5)
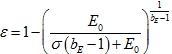
Относительная деформация ε связана с плотностью грунта ρ формулой [9]:
![]() (6)
(6)
где ρ0 – начальная плотность грунта до воздействия напряжения σ.
Результаты исследований показывают, что модуль деформации E выражается через плотность грунта степенной зависимостью [9], [10]:
![]() (7)
(7)
где aE, bE – числовые коэффициенты, зависящие от свойств грунта, его типа и состояния.
Например, лесные грунты принято классифицировать по категориям. Характерные значения ρ, E, H для различных категорий лесных грунтов представлены в таблице 1.
Таблица 1 – Свойства лесных грунтов различных категорий [9]
| Категория лесного грунта | ρ, г/см3 | E, МПа | H, м |
| Слабый (III) | 0.75 | 0.4 | 0.8 |
| Нормальный (II) | 1 | 1 | 0.4 |
| Прочный (I) | 1.25 | 3 | 0.3 |
По данным таблицы 1 при помощи метода наименьших квадратов установим, что для лесного грунта коэффициенты в формуле (7): aE = 1,16, bE = 3,91.
Переписать уравнение (7) с учетом выражения (6) возможно следующим образом:
![]() (8)
(8)
где E0 – модуль деформации грунта по формуле (7) при ρ = ρ0, то есть до воздействия движителя.
На основании формул (5), (8), получили:
![]() (9)
(9)
Решение дифференциального уравнения (9) при начальном условии ε(0) = 0 имеет вид:
 (10)
(10)
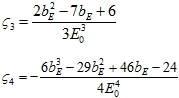
Непосредственная попытка взятия определенного интеграла по (2) с учетом (4), (10) приводит к сложностям математического характера. Для облегчения решения и упрощения последующих выкладок подынтегральная функция представится в уравнении (2) в виде полинома Тейлора:
 (11)
(11)
где fn – производная функции f порядка n по σ в точке 0, коэффициенты ςn при σn:
 (12)
(12)
Коэффициенты ςn не зависят от z, тогда запишем уравнение (2) следующим образом:
![]() (13)
(13)
Для того, чтобы взять неопределенный интеграл рациональной дроби, используется следующая формула:
![]() (14)
(14)
Тогда определенные интегралы от степеней n напряжения σ можно определить по формуле (13):
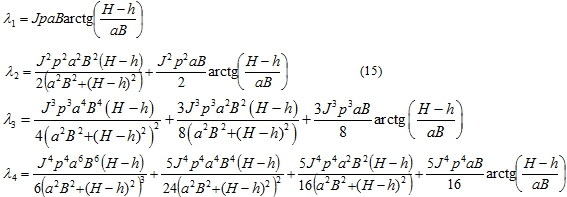
Уравнение для определения сжатия массива грунта (2) с учетом выражений (13), (15) можно представить следующим образом:
![]() (16)
(16)
где L – длина пятна контакта движителя с опорной поверхностью.
Расчеты при варьировании B = 0,4…0,8 м, L = 0,8…5 м, E, H по таблице 1, h = 0…0,8H, показывают, что в уравнении (16) можно ограничиться k = 2 практически без потери точности, тогда:

Более того, в тех же диапазонах варьирования:
![]() (18)
(18)
![]() (19)
(19)
С учетом (12), (15), (18), (19), получим из (17):
![]()
Решив уравнение (20) относительно h, получим:
![]() (21)
(21)
где C – жесткость массива грунта с учетом геометрии пятна контакта, ξ – безразмерная функция упрочнения грунта:
![]() (22)
(22)
![]() (23)
(23)
где χ – коэффициент упрочнения грунта при уплотнении:
![]() (24)
(24)
Параметры a, J в выражениях (22), (24) рассчитывается по формулам [7], [8], [10]:
![]() (25)
(25)
![]() (26)
(26)
Пример результатов расчета и выводы. Сравнение результатов расчета сжатия h по формуле (21) с решением (2) при E = const представлено графиками на рисунке 2 (B = 0,7 м, L = 1,3 м, III категория лесного грунта).
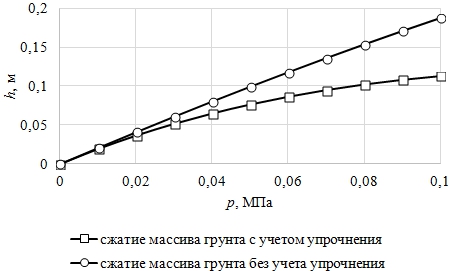
Рис. 2 – Деформация сжатия лесного грунта III категории в зависимости от давления движителя
Как показывают графики, расчетные значения глубины колеи h, полученные с использованием предлагаемой математической модели, заметно отличаются от значений, полученных расчетом при постоянном значении модуля деформации. Так, при давлении в диапазоне 0,06-0,1 МПа, характерном для взаимодействия колесных движителей лесных машин с грунтом, прогнозируемые нами значения h ниже на 30-60 %.
Для наглядности представим результаты расчета изменения E, ρ под воздействием движителя – рисунок 3.
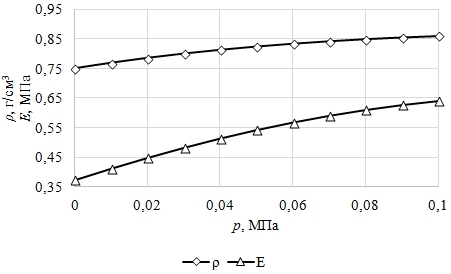
Рис. 3 – Изменение модуля деформации и плотности лесного грунта III категории в зависимости от давления движителя
Расчеты показывают, что при давлении в диапазоне 0,06-0,1 МПа плотность грунта под воздействием движителя увеличивается ориентировочно на 10-15 %, как следствие – модуль деформации увеличивается на 50-90 %.
По нашему мнению, предлагаемая математическая модель позволяет при расчете учесть упрочнение грунта под воздействием движителя, развивая тем самым базу для теоретических исследований взаимодействия движителей лесных машин с опорными поверхностями. Уравнение (21), в отличие от известных ранее, позволяет получить расчетное значение глубины колеи h не прибегая к итерациям, что упрощает разработку автоматизированных рабочих мест (АРМ), предназначенных для оценки показателей взаимодействия техники с грунтами лесосек на стадии планирования технологического процесса заготовки древесины.
Дальнейшие направления исследований, на наш взгляд, следует сосредоточить в следующих направлениях:
- Исследование изменения физико-механических свойств грунта, характеризующих сопротивление грунтов сдвигу.
- Разработка математических моделей, учитывающих потерю несущей способности грунта, расчетное значение которой также изменяется при уплотнении.
На базе полученных результатов в перспективе возможна разработка математических моделей, прогнозирующих тягово-сцепные свойства движителей, что будет полезно при оценке подвижности и проходимости лесных машин.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Герасимов Ю. Ю, Сюнёв В. С. Экологическая оптимизация технологических машин для лесозаготовок / Ю. Ю. Герасимов, В.С. Сюнёв. –. Йоэнсуу: университет Йоэнсуу, 1998. – 178 с.
- Анисимов Г. М., Большаков Б.М. Основы минимизации уплотнения почвы трелевочными системами / Г. М. Анисимов, Б.М. Большаков. – СПб. : ЛТА, 2000. – 106 с.
- Анисимов Г. М. О средствах научного проникновения в исследовании лесных машин и оборудования / Г.М. Анисимов, А. М. Кочнев // Известия ВУЗов. Лесной журнал. – 2010. – №4. – С. 39-46.
- Божбов В. Е. Повышение эффективности процесса трелевки путем обоснования рейсовой нагрузки форвардеров : Автореферат дисс. … канд. техн. наук. / Божбов Владимир Евгеньевич. – Архангельск: САФУ., 2015. – 20 с.
- Устинов В. В. Оценка тягово-сцепных свойств колесных движителей лесных машин методами теории движения автотранспорта по бездорожью : Автореферат дисс. … канд. техн. наук. / Устинов Владимир Владимирович. – Архангельск: САФУ., 2016. 20 с.
- Хахина А. М. Методы прогнозирования и повышения проходимости колесных лесных машин : дис. … докт. техн. наук : 05.21.01 / Хахина Анна Михайловна. – Архангельск: САФУ., 2018. – 318 с.
- Агейкин Я. С. Проходимость автомобилей / Я. С. Агейкин – М.: Машиностроение, 1981. – 232 с.
- Агейкин Я. С. Проходимость автомобиля / Я.С. Агейкин, Н.С. Вольская, И.В. Чичекин. – М.: МГИУ, 2010. – 275 с.
- Хитров Е. Г. Повышение эффективности трелевки обоснованием показателей работы лесных машин при оперативном контроле свойств почвогрунта : Автореферат дисс. … канд. техн. наук : 05.21.01 / Хитров Егор Германович. – Архангельск: САФУ., 2015. – 20 с.
- Ларин В. В. Методы прогнозирования и повышения опорной проходимости многоосных колесных машин на местности : дисс. … докт. техн. наук : 05.05.03 / Ларин Василий Васильевич. – Москва: МГТУ им. Н.Э. Баумана., 2007. – 530 с.
Список литературы на английском языке / References in English
- Gerasimov Ju. Ju. Jekologicheskaja optimizacija tehnologicheskih mashin dlja lesozagotovok [Ecological optimization of technological machines for logging] / Ju. Ju. Gerasimov, V.S. Sjunjov. –. Jojensuu: universitet Jojensuu [University of Joensuu], 1998. – 178 p. [in Russian]
- Anisimov G. M. Osnovy minimizacii uplotnenija pochvy trelevochnymi sistemami [Basics of minimizing the soil compaction under skidding systems] / G. M. Anisimov, B. M. Bol'shakov. – SPb. : LTA, 2000. – 106 p. [in Russian]
- Anisimov G. M. O sredstvah nauchnogo proniknovenija v issledovanii lesnyh mashin i oborudovanija [On the means of scientific methods in the study of forest machines and equipment] / G. M. Anisimov, A. M. Kochnev // Izvestija VUZov. Lesnoj zhurnal [News of Universities. Forest Magazine]. – 2010. – №4. – P. 39-46. [in Russian]
- Bozhbov V. E. Povyshenie jeffektivnosti processa trelevki putem obosnovanija rejsovoj nagruzki forvarderov [Improving the efficiency of the process of skidding by justifying the forwarders travel load] : Dissertation abstract … of PhD in engineering. / Bozhbov Vladimir Evgen'evich. – Arhangel'sk: SAFU, 2015. – 20 p. [in Russian]
- Ustinov V. V. Ocenka tjagovo-scepnyh svojstv kolesnyh dvizhitelej lesnyh mashin metodami teorii dvizhenija avtotransporta po bezdorozh'ju [Assessment of traction characteristics of wheeled rovers of forest machines using the theory of off-the-road vehicle locomotion] : Dissertation abstract … of PhD in engineering / Ustinov Vladimir Vladimirovich. – Arhangel'sk: SAFU., 2016. 20 p. [in Russian]
- Hahina A. M. Metody prognozirovanija i povyshenija prohodimosti kolesnyh lesnyh mashin [Methods of forecasting and improving mobility of wheeled forest machines] : Dissertation abstract … of PhD in engineering : 05.21.01 / Hahina Anna Mihajlovna. – Arhangel'sk: SAFU., 2018. – 318 p. [in Russian]
- Agejkin Ja. S. Prohodimost' avtomobilej [Passability of Automobiles] / Ja. S. Agejkin – M.: Mashinostroenie, 1981. – 232 p. [in Russian]
- Agejkin Ja. S. Prohodimost' avtomobilja [Passability of Automobile] / Ja. S. Agejkin, N. S. Vol'skaja, I. V. Chichekin. – M.: MGIU, 2010. – 275 p. [in Russian]
- Hitrov E. G. Povyshenie jeffektivnosti trelevki obosnovaniem pokazatelej raboty lesnyh mashin pri operativnom kontrole svojstv pochvogrunta [Improving the efficiency of skidding by justifying the performance of forest machines in the operational control of the soil properties] : Dissertation abstract … of PhD in engineering : 05.21.01 / Hitrov Egor Germanovich. – Arhangel'sk: SAFU., 2015. – 20 p. [in Russian]
- Larin V. V. Metody prognozirovanija i povyshenija opornoj prohodimosti mnogoosnyh kolesnyh mashin na mestnosti [Methods of forecasting and increasing the mobility of multi-axle wheeled vehicles on the ground] : Dissertation abstract … of PhD in engineering : 05.05.03 / Larin Vasilij Vasil'evich. – Moskva: MGTU im. N.Je. Baumana., 2007. – 530 p. [in Russian]