ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ОРИГИНАЛЬНОЙ ЧАСТИ ШЕСТИКООРДИНАТНОГО МАНИПУЛЯТОРА
Шамутдинов А. Х.
Кандидат технических наук,
Омский автобронетанковый инженерный институт
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ОРИГИНАЛЬНОЙ ЧАСТИ ШЕСТИКООРДИНАТНОГО МАНИПУЛЯТОРА
Аннотация
В данной статье экспериментально исследованы статические характеристики оригинальной части шестикоординатного манипулятора (ОЧШМ), установлены её значения на примере макета при нагрузке P=0…2000 H.
Ключевые слова: макет оригинальной части манипулятора, жесткость несущей системы, динамометр, коэффициент жесткости.
Shamutdinov A.H.
Candidate of Technical Sciences,
Omsk Tank-Automotive Engineering Institute
EXPERIMENTAL STUDY OF THE STATIC CHARACTERISTICS THE ORIGINAL PART MANIPULATOR WITH SIX-DEGREE OF FREEDOM
Abstract
In this paper, experimental study of the static characteristics of the original part of manipulator with six-degree of freedom, it value determined by the example of the layout when the load in the range P = 0...2000 H.
Keywords: original layout of the manipulator, the stiffness of the support system, the dynamometer, stiffness.
Жесткость несущей системы рассматриваемого технологического оборудования [1, 2, 3] зависит от геометрических параметров, от положения подвижной платформы в рабочем пространстве [4, 5].
Схема макета оригинальной части исследуемого манипулятора представлена на рис. 1, а схема стенда нагружения и измерения упругих перемещений в направлении оси z на рис. 2. Нагружение производилось образцовым динамометром ДОСМ - 3-0,2 с диапазоном нагрузок 0-2000 Н в плоскости YOZ в направлении оси Z (рис. 1). Увеличение нагрузки происходило ступенчато в интервале от 0 до 2000 Н, с последующей ступенчатой разгрузкой. Цикл нагружение - разгружение осуществлялся по три раза в каждом направлении при различных положениях подвижной платформы. Измерения производились в каждом из положений (I – min длина стержней и II – max длина стержней) в двух точках (плоскость XOY) рабочего стола (рис. 1, 2). Это позволило получить полную картину перемещений подвижной платформы под нагрузкой. Измерение упругих перемещений осуществлялось с точностью до 0,01 мм. Значения силы и соответствующие перемещения, полученные при испытаниях, представлены графически (рис. 3, 4): для точки 1 графики а) и для точки 2 − графики б).
Позиции на рис. 1: 1 – Поворотный стол; 2 – Левый стержень (двигатель поступательного перемещения); 3 – Правый стержень (двигатель поступательного перемещения); 4 – Наклонная платформа; 5 – Опорно-поворотное устройство; 6 − Верхний стержень (двигатель поступательного перемещения); 7 – Стойки; 8 – Рабочий стол; 9 – ось вращения манипулятора.
Позиции на рис. 2: 1 – ОЧШМ; 2 – Стойка с индикатором; 3 – Динамометр с индикатором; 4 – Домкрат (I – гидравлический, II – винтовой).
Анализируя графики на рис. 4-5, определяем максимальные значения упругих перемещений рабочего стола ОЧШМ под воздействием сжимающей (растягивающей) силы Р = 0…2000 Н: а) сжатие, Δmax=0,47 мм, растяжение, Δmax=0,45 мм; б) растяжение, Δmax=0,525 мм, Δmax=0,48 мм.
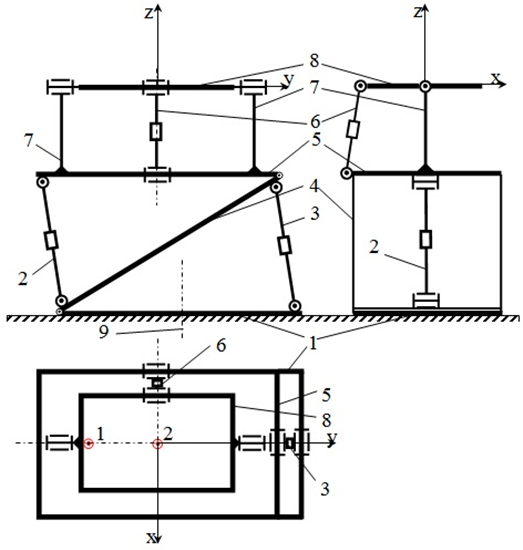
Рис. 1 - Схема макета оригинальной части исследуемого манипулятора
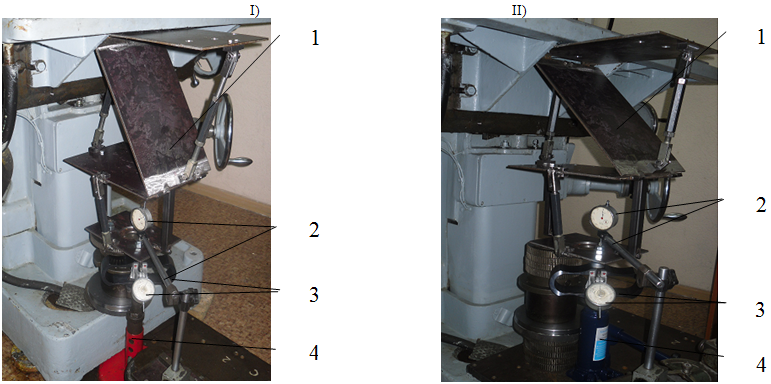
Рис. 2 - Общий вид стенда для снятия статических характеристик:
I) при минимальной длине стержней, II) при максимальной длине стержней
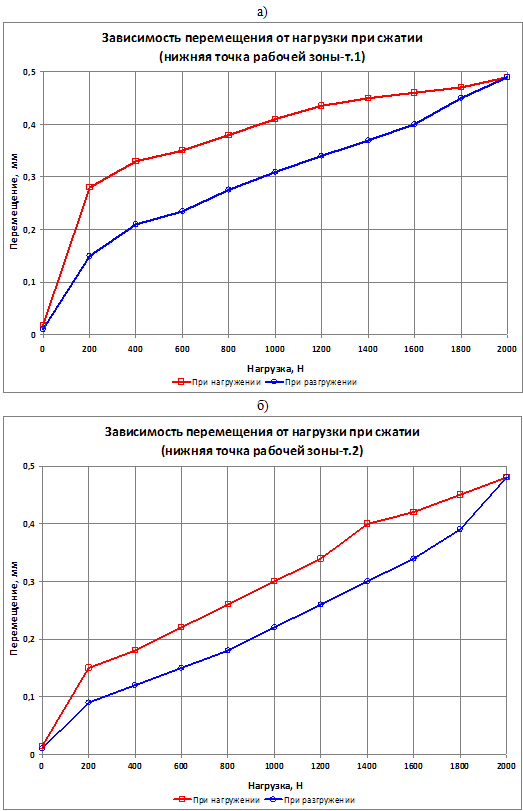
Рис. 3 - Зависимости перемещения подвижной платформы от нагрузки при минимальной длине стержней ОЧШМ
Зная величину смещения Δmax под действием силы Р = 2000 Н найдем значения коэффициентов жесткости для ОЧШМ:
 – при сжатии;
– при сжатии;
 – при растяжении.
– при растяжении.
Средние значения жесткости будут:
![]() ,
,
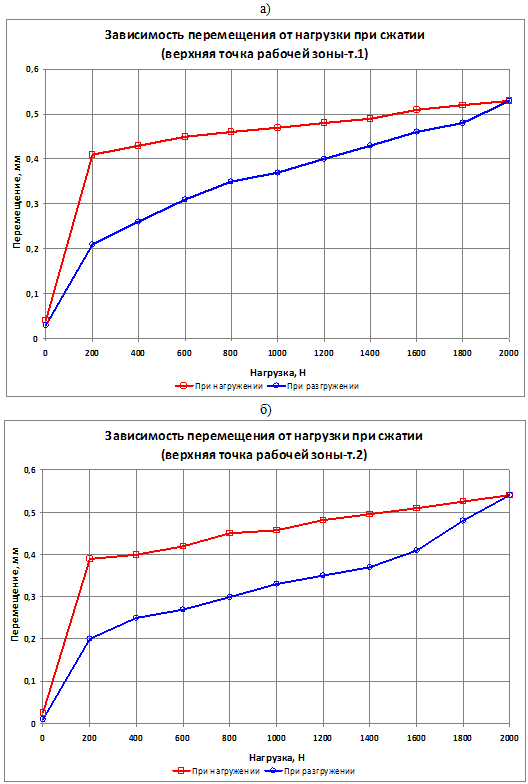
Рис. 4 - Зависимости перемещения подвижной платформы от нагрузки при максимальной длине стержней ОЧШМ
ВЫВОДЫ:
- Экспериментально установлено – жесткость ОЧШМ имеет наибольшее значение при минимальной высоте манипулятора, в вертикальной плоскости, что не противоречит положениям теории упругости;
- Опорно-поворотное устройство ОЧШМ имеет жесткость сравнимую с жесткостью рабочего стола, что объясняется тем, что жесткость ОЧШМ составляет совокупность трех элементов: опорно-поворотное устройство, наклонная платформа и поворотный стол;
- Установлены средние значения жесткости макета манипулятора:
 что позволяет применить эксплуатационные возможности оборудования в конкретных условиях.
что позволяет применить эксплуатационные возможности оборудования в конкретных условиях.
Литература
- Пат. ПМ №120599 РФ, МПК В25J1/00. Пространственный механизм. / П.Д. Балакин, А.Х. Шамутдинов – №2011153160/02; Заявлено 26.02.2011; Опубл. 27.09.2012, Бюл. №27. – 2 с.: ил.
- Балакин П.Д., Шамутдинов А.Х. Схемное решение механизма шестикоординатного манипулятора // Международный научно-технический журнал ISSN 2303-9869. − Екатеринбург, ООО «Имплекс». − 2013. − Ч.1 №6(13) − С.97-99.
- Балакин П.Д., Шамутдинов А.Х. Исследование жесткости механизма шестикоординатного манипулятора // Международный научно-технический журнал ISSN 2303-9869. − Екатеринбург, ООО «Имплекс». − 2013. − Ч.1 №6(13) − С.99-102.
- Евстигнеев В.Н., Левина З.М. Оценка компоновок многоцелевых станков по критерию жесткости // Станки и инструменты. – 1986. − №1 С. 5-7.
- Каминская В.В., Гринглаз А.В. Расчетный анализ динамических характеристик несущих систем станков // Станки и инструменты. – 1989. – №2. С. 10-13.