ДИЗАЙН АВТОНОМНОГО МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА
ДИЗАЙН АВТОНОМНОГО МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА
Научная статья
Аббасов И.Б.1, *, Игнатьев В.В.2, Орехов В.В.3
1 ORCID: 0000-0003-4805-8714
1, 2, 3 Южный федеральный университет, Инженерно-технологическая академия, Таганрог, Россия
* Корреспондирующий автор (iftikhar_abbasov[at]mail.ru)
Аннотация
Работа посвящена компьютерному моделированию автономного мобильного робототехнического комплекса. Сделан обзор публикаций и аналогов, представлена структурная схема и конструкция разработанного робототехнического комплекса. Проведен поиск концепции корпуса робота, представлен поэтапный процесс его трехмерного моделирования. Обводы корпуса создаются методом высокополигонального моделирования. Описан процесс настройки и присвоения материалов на основе полигональных элементов модели. Выбран визуализатор и установлены источники освещения, приведены итоговые сцены визуализации сцены с роботом.
Ключевые слова: мобильный робот, конструкция робота, концептуальное моделирование, промышленный дизайн, полигональное моделирование, создание и присвоение материалов, метод освещения, визуализация.
DESIGN OF AUTONOMOUS MOBILE ROBOT SYSTEM
Research article
Abbasov I.B.1, *, Ignatiev V.V.2, Orekhov V.V.3
1 ORCID: 0000-0003-4805-8714,
1, 2, 3 South Federal University, Academy of Engineering and Technology, Taganrog, Russia
*Corresponding author (iftikhar_abbasov[at]mail.ru)
AbstractThe paper is devoted to computer simulation of an autonomous mobile robot system. The review of publications and analogs is carried out, the block diagram and design of the developed robotic complex is presented as well. A search for the concept of the robot body is carried out, and a gradual process of its three-dimensional modeling is presented. The hull lines are created using high-poly modeling. The process of setting up and assigning materials based on polygonal elements of the model is described. The visualizer is selected, and the light sources are installed, the final scenes of the scene visualization with the robot are shown.
Keywords: mobile robot, robot design, conceptual modeling, industrial design, polygonal modeling, creation, and assignment of materials, lighting method, visualization.
Введение
Сегодня значение роботизированных систем в жизни человека является актуальной, как никогда. Во многих областях нашей жизни роботизированные системы разного уровня сложности используются в качестве помощников. В большинстве случаев роботы приходят на помощь человеку там, куда доступ для людей не возможен или это связано с определенным риском для жизни и здоровья. Во многих развитых странах проводятся исследования по разработке мобильных роботов разного назначения. Сейчас в технологической области достигнуты существенные результаты по созданию мощных бортовых вычислителей, компактных исполнительных механизмов, интеллектуальных сенсоров. Современные алгоритмы используют быстродействующие методы обработки информации при управлении движением, как одиночных мобильных робототехнических систем, так и в составе группы.
В данной работе рассматривается конструкция и проводится компьютерное моделирование автономного четырёхколесного мобильного робототехнического комплекса для решения различных задач. При решении задач в области промышленного дизайна рациональным является предварительная проработка и выбор конструкции корпуса изделия. Разработанный мобильный робототехнический комплекс имеет трёхуровневую систему управления и может работать в составе группы при перемещении в условиях неполноты данных, в недетерминированной среде. Рассмотрим некоторый обзор современных исследований в данной области и существующие аналоги созданного робототехнического комплекса.
Обзор публикаций
Работа [1] посвящена анализу текущего состояния общемировых тенденций в сфере создания малоразмерных робототехнических средств обеспечения различного назначения. В работе [2] представлен обзор исследований в области управления автономными мобильными роботами. Рассмотрена возможность использования принципов интерпретирующей навигации для повышения автономности многофункциональных мобильных робототехнических комплексов радиационной разведки «МРК-2» и «РТК-08» (НИИ Робототехники и технической кибернетики, г. Санкт-Петербург).
В статье [3] описываются вопросы управления движением подвижного робота в недетерминированной среде методом потенциальных полей. В обзорной статье [4] представлен анализ результатов исследований в области планирования маршрутов мобильного робота на основе классического и эволюционного подхода. В книге [5] рассматриваются современные методы группового управления подвижными объектами в неопределенных средах. Описываются методы группового управления с применением нечеткой логики и неустойчивых режимов.
Статья [6] описывает основные методы, связанные с модульной и реконфигурируемой мобильной робототехникой. В работе [7] исследуются проблемные вопросы разработки автономных наземных робототехнических комплексов специального назначения для целей высокоточной навигации. Взаимодействие мобильных роботов в составе группы имеет важное практическое значение. Статья [8] посвящена обзору робототехнических исследований при разработке групповых роботизированных систем для реальной среды.
Обзор аналогов
Отметим также некоторые аналоги разработанного мобильного робототехнического комплекса. Четырехколесный мини робот Nerva LG (масса 4 кг) компании Nexter Robotics (Франция), предназначен для дистанционной разведки окружающей обстановки. Многоцелевые компактные роботы FirstLook (масса 2,4 кг), SUGV (13,5 кг), PackBot (масса 18 кг), разработаны компанией iRobot (США) для задач противодействия самодельным взрывным устройствам и обнаружения потенциальной опасности во время выполнения боевой операции. Малогабаритный четырехколесный робот MTGR (масса 9,4 кг) разработан компанией Roboteam (Израиль), предназначен для разминирования взрывоопасных предметов, разведки, обнаружения химического, бактериологического или радиационного заражения [9]. Мобильные робототехнические комплексы «Вездеход ТМ3» (масса 35 кг) и «Варан» (масса 185 кг) предназначены для дистанционного проведения визуальной разведки, поиска и обезвреживания взрывных устройств, разработаны НИИ специального машиностроения МГТУ им. Н.Э. Баумана [10].
Конструкция робота
Конструкция разработанного робототехнического комплекса в сборке представлена на рис.1. Базовая платформа комплекса имеет следующие характеристики: длина 360мм, ширина 225 мм, высота 200 мм, время непрерывной работы без подзарядки 1 час, максимальная скорость движения 10 км/час, минимальная скорость 1см/сек, масса 3 кг.
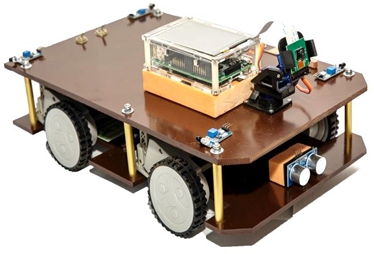
Рис. 1 – Конструкция мобильного робототехнического комплекса
Структурная схема мобильного робототехнического комплекса с трёхуровневой системой управления представлена на рис.2. Нижний уровень состоит из четырёх колес, электродвигателей с энкодерами, драйверов питания двигателей и микроконтроллеров управления сервопривода. Микроконтроллеры выполняют функцию адаптивных пропорционально-интегрально-дифференцирующих регуляторов.
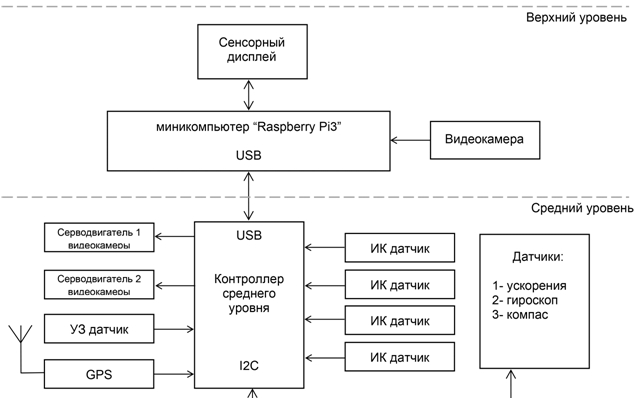
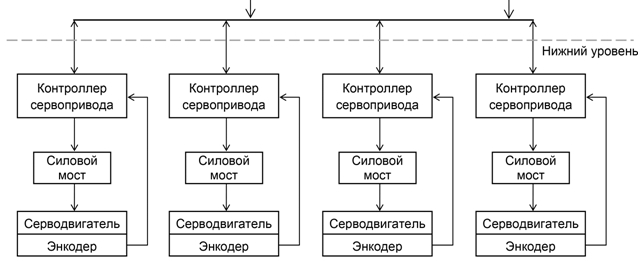
Рис. 2 – Структурная схема мобильного робототехнического комплекса
Микроконтроллер среднего уровня осуществляет сбор и предварительную обработку информации об окружающей среде. К микроконтроллеру среднего уровня подключены: акселерометр; гироскоп; компас; четыре инфракрасных датчика расстояния; ультразвуковой датчик расстояния; GPS датчик. На данном уровне также находятся сервоприводы наведения и камеры, которые управляются данным микроконтроллером.
Верхний уровень управляет роботом и базируется на миникомпьютере Raspberry PI3 [11], [12]. Миникомпьютер реализует протоколы передачи данных: Bluetooth, Ethetnet, Wi-Fi. Камера робота дает возможность реализации технического зрения, все уровни связанны между собой протоколами обмена данными. Микроконтроллер среднего уровня связан с микрокомпьютером верхнего уровня по протоколу UART (Universal asynchronous receiver/transmitter). Данное соединение позволяет избегать неисправностей при разных уровнях сигналов. Микроконтроллеры среднего и нижнего уровня связываются по протоколу I2C или TWI, это обеспечивает минимальную скорость обмена данными.
Концепция моделирования
Перейдем к разработке компьютерной трехмерной модели робототехнического комплекса и обводов его внешнего корпуса исходя из условий эксплуатаций. Необходимо создать варианты корпуса робота с верхней площадкой, где будет находиться грузовой отсек или рычаг манипулятора. Авторы имеют опыт по решению задач промышленного дизайна в области машиностроения и гидроавиации [13], [14], [15].
Сначала проводится эскизное проектирование конструкции внутренней платформы робота на основе габаритных размеров и компоновки элементов. Далее в процессе поиска обводов внешнего корпуса робота был проанализирован ассоциативный ряд биологических прототипов, были найдены некоторые визуальные решения [16]. На рис.3 представлены варианты визуального поиска на основе членистоногих раков и крабов. Набор эскизов в дальнейшем будет определять стилистику и цветовую гамму будущего изделия, в качестве биологического прототипа был выбран красный мангровый краб Sesarma [17]. Краб является представителем членистоногих, класса ракообразных, имеет 5 пар конечностей, передняя пара имеет вид мощных клешней. При потере одной из них, вырастает новая клешня, поэтому часто в природе клешни являются асимметричными. Из-за габаритных клешней крабы обычно двигаются задом или боком.
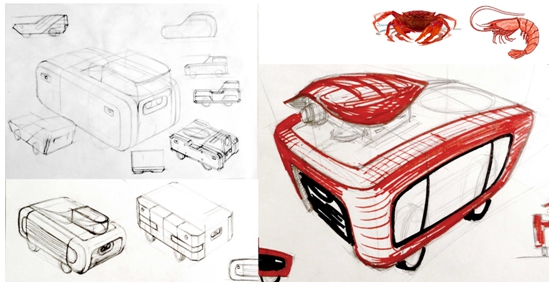
Рис. 3 – Варианты визуального поиска обводов корпуса
Этапы моделирования
В результате поэтапного поиска с учетом функциональности и эстетики был проработан один из вариантов объемного решения, который наилучшим образом соответствует требованиям технического задания (рис.4, внизу). Корпус должен быть не только эстетичным, но и практичным, предотвращая попадание сторонних предметов и пыли во внутреннюю часть робота. Кроме вышеперечисленных задач, корпус играет роль носителя айдентики – корпоративной идентичности. На корпусе размещается визуальная информация об организации разработчике, он может окрашиваться в корпоративные цвета, или же для специальных задач приобретать камуфлирующую окраску.
Итоговый вариант обводов корпуса продиктован современными тенденциями транспортного дизайна и эргономики. Для корпуса используется пластиковый материал, глянцевое покрытие которого, может быть заменено на более практичное – матовое.
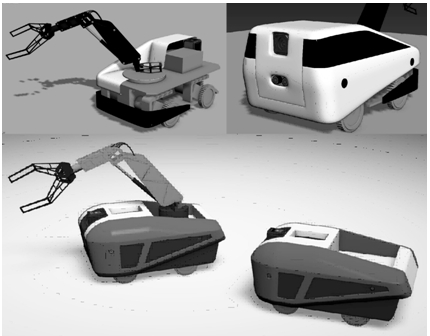
Рис. 4 – Трехмерные поисковые модели будущего корпуса
Конструкция корпуса состоит из четырёх частей (рис.5), центральная - формирует лобовую часть корпуса и площадку для манипулятора. Две симметричные половинки справа и слева, имеют отверстия для инфракрасных датчиков, задняя нижняя крышка прикрывает колеса.
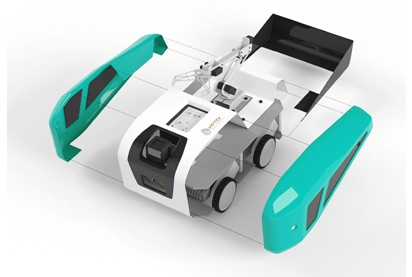
Рис. 5 – Схема сборки корпуса робота
На следующем этапе разработки создается трехмерная компьютерная модель прототипа корпуса. Разнообразие программных продуктов двумерной и трехмерной графики позволяет воплощать различные дизайнерские идеи. Сначала необходимо иметь двумерные чертежи, схемы или фотографии, которые потом экспортируются в универсальные форматы для последующей обработки в трехмерном пространстве. Одним из таких форматов является DWG, в качестве программы трехмерного моделирования мы будем использовать графическую систему 3ds Max [18]. Этот программный продукт наряду с другими методами позволяет создавать модели методом High-Poly (высокополигонального) моделирования. Благодаря чему, обводы модели будут иметь не граненый вид, а более обтекаемые формы.
Для создания реалистичной модели корпуса в графической системе 3ds Max используются проекции, разрезы и сечения будущего корпуса. Стандартная схема High-Poly моделирования состоит из постепенного наращивания уровня детализации трехмерного объекта:
- на первом уровне модель представляет собой приближенную форму объекта;
- на втором уровне происходит уточнение исходной формы, добавлением фасок и закруглений;
- на третьем уровне осуществляется четкая детализация объекта с применением методов сглаживания.
Далее производится уточнение и доводка модели корпуса, на конечном этапе применяется модификатор TurboSmooth для итогового сглаживания (рис.6).
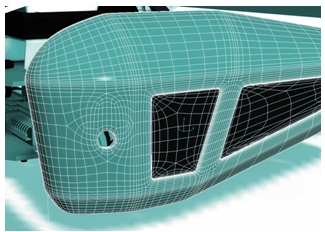
Рис. 6 – Высокополигональная сетка модели корпуса
Создание и присвоение материалов
Далее необходимо настроить модель для создания и применения материалов. Методы создания материалов определяются последующим способом визуализации сцены. Для создания реалистичной визуализации в графической системе 3ds Max будет применен внешний блок визуализации V-Ray от ChaosGroup. Этот программный пакет содержит много параметров, позволяющих управлять качеством визуализации сцены и временем просчета. Визуализатор требует применения и настройки своего собственного набора материалов VRayMtl, который отличается от стандартных материалов.
Настройка материала осуществляется в свитке Basic parameters редактора материалов. При создании сцены с моделью робота, были применены несколько материалов с характерными параметрами. Перед присвоением материалов разбиваем трехмерную модель на составные части Element. Потом создаем материал для имитации пластика и применяем его к соответствующим элементам.
Рассмотрим основные параметры создаваемого материала (рис.7):
- свиток Diffuse, диффузный цвет – это цвет поверхностного рассеивания, цвет поверхности объекта, можно выбрать однотонный цвет или задать текстуру. В нашем случае мы выбираем без текстуры, имитируя белый пластик;
- следующий свиток – это Reflection (Отражение), настраивает отражающие свойства материала. Поверхности в окружающем пространстве обладают разными отражающими свойствами. Если в данном окне выбран 100% черный цвет, то это лишает поверхность материала отражений, белый, наоборот, – делает его полностью отражающим. Все промежуточные значения серого цвета определяют интенсивность отражения;
- необходимо обратить внимание на следующий параметр настройки отражения и прохождения Fresnel IOR (index of refraction), это коэффициент Френеля, зависит от рефракции световых лучей.
Остальные материалы данной сцены настраиваются аналогичным образом. Отдельно стоит отметить настройку материала для надписей на корпусе робота. В этом случае в качестве диффузного цвета в свитке Diffuse применяется текстура на основе растрового изображения фирменного логотипа. Присвоение материалов происходит на уровне полигонов, с предварительным выделением соответствующей группы.
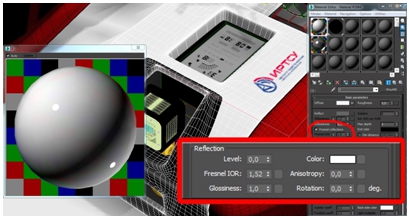
Рис. 7 – Диалоговое окно для настройки отражения материала
Установка освещения и визуализация
На следующем этапе производится настройка, установка параметров освещения с последующей визуализацией. В графических системах моделирования используется два типа освещения: искусственное (светильники) и естественное (свет от неба и солнца). Более реалистичные визуализации получаются при комбинировании этих типов освещения.
Используемый визуализатор VRay является достаточно популярной программой, отличается от аналогов качеством и быстротой. Для нашей сцены будем имитировать студийное освещение (искусственное). Для этого модель робота размещаем на основании без четкой линии горизонта (плоскость основания плавно переходит в плоскость заднего фона). Тогда получается мягкий фон, на котором располагается созданная модель робота (рис.8).
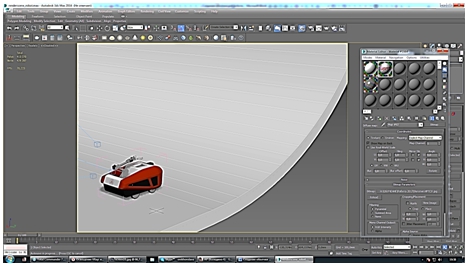
Рис. 8 – Создание сцены окружения для визуализации
Имитация искусственного освещения осуществляется установкой двух равнозначных источников VRay-Light с противоположных сторон. Это позволяет получить блики на поверхности модели, которые необходимы для реалистичной визуализации. Для регулирования ракурса съемки установлена камера, результаты финальной визуализации сцены с моделью робота представлены на рис.9.

Рис. 9 – Итоговая визуализация сцены
Заключение
В заключение можно отметить, что в данной работе была описана конструкция и проведено компьютерное моделирование разработанного мобильного робототехнического комплекса. Он может быть использован как для промышленных, так и для образовательных целей. В результате моделирования был создан эстетичный и функциональный корпус, который подчеркивает основное назначение данного изделия. Процесс предварительного прототипирования дает возможность рационального выбора и обоснования конструкции робототехнического комплекса перед его производством.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Васильев А.В. Мобильные мини-роботы разведки: текущее состояние, характерные черты и общие тенденции развития /А.В. Васильев / //Известия ЮФУ. Технические науки. 2010. №3. С.119-124.
- Лопота А. В. Основные результаты и перспективные направления исследований в области навигации и управления мобильными робототехническими комплексами /А.В. Лопота, С.А. Половко, Е.Ю. Смирнова Е. Ю, М.Н. Плавинский//Исследования наукограда. 2013. №2 (4). С.49-53
- Soloviev V.V., Pshikhopov V.K., Shapovalov I.O., Finaev V.I., Beloglasov D.A. Planning of the mobile robot motion in nondeterministic environments with potential fields method //International Journal of Applied Engineering Research. 2015. V.10, №21 P.41954 – 41961.
- Raja P., Pugazhenthi S. Optimal path planning of mobile robots: A review//International Journal of Physical Sciences, 2012, Vol. 7(9), P.1314-1320, doi: 10.5897/IJPS11.1745
- Белоглазов Д.А. и др. Групповое управление подвижными объектами в неопределенных средах /Д.А. Белоглазов, А.Р. Гайдук, Е.Ю. Косенко и др. /под редакцией проф. В.Х. Пшихопова. – М.:Физматлит, 2015. – 305с.
- Moubarak P., Ben-Tzvi P. Modular and reconfigurable mobile robotics //Robotics and Autonomous Systems, 2012, V.60, Issue 12, P.1648-1663, doi:10.1016/j.robot.2012.09.002
- Лапшов В.С. Перспективы разработки автономных наземных робототехнических комплексов специального военного назначения /В.С. Лапшов, В.П. Носков, И.В. Рубцов, Н.А. и др. //Известия ЮФУ. Технические науки. 2016. №1. С.156-168.
- Barca J.C., Sekercioglu Y.A. Swarm robotics reviewed //Robotica. 2013 V.31,P.345–359. doi:10.1017/S026357471200032X
- Военное обозрение. Интернет журнал. [Офиц. сайт]. URL: https://topwar.ru (дата обращения: 07.11.2018).
- Отдел СМ4-1 Проектирование конструкций робототехнических систем [Офиц. сайт]. URL: http://www.niism.bmstu.ru/otdelyi-nii-sm/sm4-1/ (дата обращения: 14.11.2018).
- Программа управления транспортным роботом для автоматизации распределения грузов на складе: заявка № 2016612284 от 17.03.2016г. Авторы: Лещенко В.В., Лещенко С.А., В.В. Игнатьев, О.Б. Спиридонов. Свидетельство о государственной регистрации программы для ЭВМ №2016616217 от 8.06.2016г.
- Штучный А.М. Программно-аппаратная реализация системы управления автономным мобильным робототехническим комплексом /А.М. Штучный А.М., С.А. Лещенко С.А., В.В. Игнатьев В.В и др.//Актуальные вопросы науки: Материалы XXVIII Международной научно-практической конференции. М.: Издательство «Спутник +», 2016. С.190-192
- Аббасов И.Б. Компьютерное моделирование в промышленном дизайне /И.Б. Аббасов/. – М.: ДМК Пресс, 2013. – 92с.
- Abbasov I.B., Gabrilyan H. Conceptual Design of «Lotos» Motorcar //IOSR Journal of Computer Engineering, 2016, V.18, Is.2, Ver.4, pp. 33-36, doi:10.9790/0661-1802043336
- Abbasov I.B., Orekhov V.V. Computational modeling of the cabin interior of the conceptual model of amphibian aircraft “Lapwing” //Advances in Engineering Software. 2017. V.114, P.227–234, org/10.1016/j.advengsoft.2017.07.003
- Васин C.А. Проектирование и моделирование промышленных изделий /Васин С.А., Талащук А.Ю., Бандорин В.Г., и др./. М.: – Машиностроение. – 2004, – 692 с.
- Заренков Н.А. Зоология беспозвоночных. Членистоногие. Ракообразные /Н.А. Заренков/. М.: Изд-во Ленанд, 2015, 304с.
- Аббасов И.Б. Основы трехмерного моделирования в графической системе 3 ds Max 2018 /И.Б. Аббасов/. Учебное пособие. Допущено УМО в области дизайна, монументального и декоративного искусств. М.: ДМК Пресс. 2017. 186с.
Список литературы на английском языке / References in English
- Vasil'yev A.V. Mobil'nyye mini-roboty razvedki: tekushcheye sostoyaniye, kharakternyye cherty i obshchiye tendentsii razvitiya [Mobile mini-intelligence robots: current status, characteristics and general development trends] / Vasil'yev A.V. //Izvestiya YUFU. Tekhnicheskiye nauki. 2010. №3. 119-124. 1. // Izvestia SFU. Technical science. 2010. №3. P.119-124. [in Russian]
- Lopota A. V. Osnovnyye rezul'taty i perspektivnyye napravleniya issledovaniy v oblasti navigatsii i upravleniya mobil'nymi robototekhnicheskimi kompleksami [Main results and perspective directions of research in the field of navigation and control of mobile robotic complexes] / А.V. Lopota, S.A. Polovko, E.Yu. Smirnova E. Yu, M.N. Plavinsky// Science Research. 2013. №2 (4). P.49-53 [in Russian]
- Soloviev V.V., Pshikhopov V.K., Shapovalov I.O., Finaev V.I., Beloglasov D.A. Planning of the mobile robot motion in nondeterministic environments with potential fields method //International Journal of Applied Engineering Research. 2015. V.10, №21 P.41954 – 41961.
- Raja P., Pugazhenthi S. Optimal path planning of mobile robots: A review//International Journal of Physical Sciences, 2012, Vol. 7(9), P.1314-1320, doi: 10.5897/IJPS11.1745
- Beloglazov D.A. i dr. Gruppovoye upravleniye podvizhnymi ob"yektami v neopredelennykh sredakh [Group control of mobile objects in uncertain environments] /D.A. Beloglazov, A.R. Gayduk, Ye.YU. Kosenko i dr. /pod redaktsiyey prof. V.KH. Pshikhopova. – M.:Fizmatlit, 2015. – 305s. Edited by prof. V.H. Pshihopova. - M.: Fizmatlit, 2015. – 305p. [in Russian]
- Moubarak P., Ben-Tzvi P. Modular and reconfigurable mobile robotics //Robotics and Autonomous Systems, 2012, V.60, Issue 12, P.1648-1663, doi:10.1016/j.robot.2012.09.002
- Lapshov V.S. Perspektivy razrabotki avtonomnykh nazemnykh robototekhnicheskikh kompleksov spetsial'nogo voyennogo naznacheniya [Prospects for the development of autonomous ground-based robotic systems for special military purposes] /V.S. Lapshov, V.P. Noskov, I.V. Rubtsov, N.A. i dr. //Izvestiya YUFU. Tekhnicheskiye nauki. 2016. №1. S.156-168. Lapshov V.S. / V.S. Lapshov, V.P. Noskov, I.V. Rubtsov, N.A. et al. // Izvestiya SFU. Technical science. 2016. №1. P.156-168. [in Russian]
- Barca J.C., Sekercioglu Y.A. Swarm robotics reviewed //Robotica. 2013 V.31,P.345–359. doi:10.1017/S026357471200032X
- Voyennoye obozreniye. Internet zhurnal. [Military Review. Internet journal] [Ofits. sayt]. URL: https://topwar.ru (accessed: 07.11.2018). [in Russian]
- Otdel SM4-1 Proyektirovaniye konstruktsiy robototekhnicheskikh sistem [Department SM4-1 Design of structures of robotic systems] [Ofits. sayt]. URL: http://www.niism.bmstu.ru/otdelyi-nii-sm/sm4-1/ (accessed: 11/14/2018).
- Program upravleniya transportnym robotom dlya avtomatizatsii raspredeleniya gruzov na sklade [The control program of the transport robot to automate the distribution of goods in stock]: zayavka No. 2016612284 ot 03.17.2016g. Avtory: Leshchenko V.V., Leshchenko S.A., V.V. Ignat'yev, O.B. Spiridonov. Svidetel'stvo o gosudarstvennoy registratsii programmy dlya EVM №2016616217 ot 06.06.2016g. [in Russian]
- Shtuchnyy A.M. Programmno-apparatnaya realizatsiya sistemy upravleniya avtonomnym mobil'nym robototekhnicheskim kompleksom [Software and hardware implementation of the autonomous mobile robotic complex control system] /A.M. Shtuchnyy A.M., S.A. Leshchenko S.A., V.V. Ignat'yev V.V i dr.//Aktual'nyye voprosy nauki: Materialy XXVIII Mezhdunarodnoy nauchno-prakticheskoy konferentsii. M .: Izdatel'stvo "Sputnik +", 2016. S.190-192 [in Russian]
- Abbasov I.B. Komp'yuternoye modelirovaniye v promyshlennom dizayne [Computer modeling in industrial design] /I.B. Abbasov /. - M .: DMK Press, 2013. - 92s. [in Russian]
- Abbasov I.B., Gabrilyan H. Conceptual Design of «Lotos» Motorcar //IOSR Journal of Computer Engineering, 2016, V.18, Is.2, Ver.4, pp. 33-36, doi:10.9790/0661-1802043336
- Abbasov I.B., Orekhov V.V. Computational modeling of the cabin interior of the conceptual model of amphibian aircraft “Lapwing” //Advances in Engineering Software. 2017. V.114, P.227–234, org/10.1016/j.advengsoft.2017.07.003
- Vasin C.A. Proyektirovaniye i modelirovaniye promyshlennykh izdeliy [Design and modeling of industrial products] /Vasin S.A., Talashchuk A.YU., Bandorin V.G., i dr./. M .: - Mashinostroyeniye. - 2004, - 692 s. [in Russian]
- Zarenkov N.A. Zoologiya bespozvonochnykh. Chlenistonogiye. Rakoobraznyye [Invertebrate zoology. Arthropods. Crustaceans] /N.A. Zarenkov /. M .: Izd-vo Lenand, 2015, 304s. [in Russian]
- Abbasov I.B. Osnovy trekhmernogo modelirovaniya v graficheskoy sisteme 3 ds Max 2018 [The basics of three-dimensional modeling in a graphics system 3 ds Max 2018] /I.B. Abbasov /. Uchebnoye posobiye. Dopushcheno umo v oblasti dizayna, monumental'nogo i dekorativnogo iskusstv. M .: DMK Press. 2017. 186s. [in Russian]