СИСТЕМА СЛЕЖЕНИЯ НА ОСНОВЕ ИК ДАТЧИКА ПОД УПРАВЛЕНИЕМ МИКРОКОНТРОЛЛЕРА ATMEGA16
Черных А.А.
Студент; НИ Томский политехнический университет
СИСТЕМА СЛЕЖЕНИЯ НА ОСНОВЕ ИК ДАТЧИКА ПОД УПРАВЛЕНИЕМ МИКРОКОНТРОЛЛЕРА ATMEGA16
Аннотация
В данной работе будет описана реализация системы слежения на основе ИК дальномера SHARP GP2Y0A02 под управлением микроконтроллера Atmega16. Данная система является необходимой частью роботов (различные платформы) для ориентации а также слежении за другими объектами.
Ключевые слова: микроконтроллер, ИК датчик, система слежения.
Chernykh A.A.
Student; Tomsk Polytechnic University
TRACKING SYSTEM BASED ON IR SENSOR CONTROLLED BY ATMEGA16 MICROCONTROLLER
Abstract
In this article will be described the tracking system implementation based on infrared distance sensor SHARP GP2Y0A02 controlled by microcontroller Atmega16. This system is a essential part of the various robotic systems (various platforms) used for targeting and for tracking other objects.
Keywords: microcontroller, IR sensor, tracking system.
Введение
Автоматизация занимает огромную роль в жизни человека. Помогает в повседневной жизни, позволяет повысить производительность, делает безопасным выполнение вредных и опасных работ. В военных целях сохранить жизнь при выполнении опасных операций, а также облегчает выполнение задания, и повышает эффективность и точность. В быту помогает человеку в повседневной жизни, для развлечения и других целей. В автоматизированных и автоматических системах требуется устройство для ориентации робота в пространстве. Существуют уже готовые решения, но и у них есть недостатки. Возможна установка ультразвуковых датчиков вокруг робота, как это реализовано в роботах-пылесосах широко применяемых в быту. Также одно из решений это крепления ультразвукового датчика к сервоприводу для анализа одним датчиком сразу большой территории вокруг себя.
Устройство системы слежения
Для реализации радара подобрана следующая элементная база: ИК дальномер SHARP GP2Y0A02, текстолит, микроконтроллер Atmega 16, редуктор с DC двигателем, оптопара KTIR, стабилизатор напряжения, конденсатор, резистор, батарея питания двигателя и МК, соединительные провода.

Рис.1 - ИК дальномер
SHARP GP2Y0A02

Рис.2 - Микроконтроллер
Atmega16

Рис.3 - Редуктор с DC двигателем

Рис.4 - Оптопара KTIR
Работа ИК дальномера
Расстояние до объекта сенсоры определяют при помощи триангуляции (Рис.5). Импульс света в (ИК диапазоне), излучается и отражается обратно от препятствия (или не отражается).
Угол падения возвращаемого светового луча зависит от расстояния до отражающего объекта. Чем дальше предмет, тем соответственно меньше угол α (Рис.5). Угол падения на CDD матрицу соответственно тоже изменяется обратно пропорционально. Таким образом, рассчитывается расстояние до предмета. Соответствующее значение дальности подаётся на аналоговый выход сенсора, которое может быть считано нашим микроконтроллером.
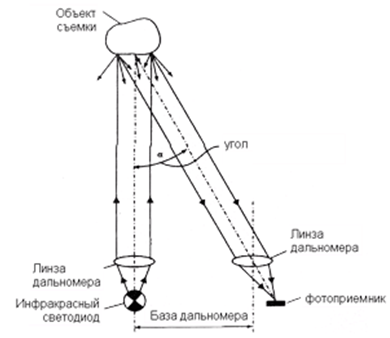
Рис.5 - Схема работы ИК дальномера
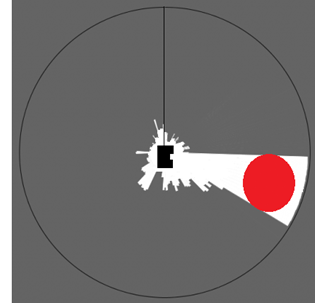
Рис.6 - Принцип работы системы слежения
Принцип работы радара
Вращение датчика осуществляется двигателем через редуктор для достижения нужной скорости для большей скорости и без потери данных (1,5 оборота в секунду). Для передачи данных и питания используется скользящий контакт (круглая пластина из текстолита с двумя дорожками, одна из которых задействована под передачу данных, другая – под “землю”). Ось служит для питания ИК дальномера. На каждом обороте датчика при прохождении выступа через отверстие оптопары вызывается аппаратное прерывание, и таким образом точка отсчета определяется вновь. Радиус измерения с 20 до 150 см (согласно заявленному в документации датчика). При попадании объекта в область действия датчика наблюдаем провал (Рис.6). Таким образом, площадь пространства между объектом и датчиком оказывается меньше окружающей площади пространства. Так вычисляется предмет, и соответственно происходит слежение с обновлением каждые 0,67 секунд. В зависимости от поставленной задачи, зная расположение объекта можно выполнять те или иные действие (наводить камеру, двигаться за объектом и т.д.).
Заключение
Данная система имеет следующие преимущества: диапазон измерений 20-150см, что является относительно неплохим результатом в сравнении с другими приборами, используемыми для решения аналогичных задач, в том же ценовом диапазоне; относительно высокая скорость сканирования, позволяющая своевременно получать информацию роботом о препятствиях; экономически выгодное решение в сравнении с аналогичными системами.
Список литературы
Электронная энциклопедия [Электронный ресурс]. URL: http://ru.wikipedia.org Режим доступа: свободный (дата обращения: 01.10.2013).
Лебедев М.Б. CodeVisionAVR пособие для начинающих. – Москва, издательский дом “Додэка – XXI”, 2008. – 594с.
Юревич Е.И. Основы робототехники. – Санкт Петербург, БХВ-Петербург, 2005. – 416с.