МОДЕЛЬ УПРАВЛЕНИЯ АДАПТИВНЫМИ РЕАКЦИЯМИ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ НА ПРИМЕРЕ ЗЕРНОВКИ
Васильев А.Н.
ORCID: 0000-0002-7988-2338, доктор технических наук, профессор, Федеральный научный агроинженерный центр ВИМ
МОДЕЛЬ УПРАВЛЕНИЯ АДАПТИВНЫМИ РЕАКЦИЯМИ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ НА ПРИМЕРЕ ЗЕРНОВКИ
Аннотация
В технологических процессах сельского хозяйства желательно иметь средства контроля и управления, которые оперативно и объективно получают информацию о реакции биологических объектов на внешние воздействия. Одним из этапов решения этой сложной задачи является разработка моделей описывающих процесс реагирования биологического объекта на воздействие. В предлагаемом материале представлена примерная функциональная схема модели биологического объекта (на примере зерновки). Рассматривается алгоритм адаптивного случайного поиска в реакции зерновки на внешнее воздействие.
Ключевые слова: сельское хозяйство, биологический объект, зерно, управление, адаптивная реакция.
Vasilyev A.N.
ORCID: 0000-0002-7988-2338, PhD in Engineering, Professor, Federal Scientific Agro-engineering Centre
MODEL OF MANAGEMENT OF ADAPTIVE REACTIONS OF BIOLOGICAL OBJECTS ON THE EXAMPLE OF GRAIN
Abstract
It is desirable to have means of control and management in the technological processes of agriculture that promptly and objectively receive information about the response of biological objects to external influences. One of the stages of solving this complex problem is related to the development of models describing the response process of a biological object to the impact. In the proposed material, an exemplary functional diagram of a biological object model (on the example of grain) is presented. An algorithm for adaptive random search in the reaction of grain to an external action is considered.
Keywords: agriculture, biological object, grain, management, adaptive reaction.
Одной из основных особенностей технологических процессов сельскохозяйственного производства является взаимодействие с биологическими объектами. Как правило, целью технологического процесса является получение заданных или изменение в требуемом диапазоне свойств биологического объекта (прирост живой массы, увеличение надоев, яйценоскости, увеличение урожайности, количества и качества клейковины). Эффективность этих процессов зависит от наличия технических средств, позволяющих контролировать состояние биологического объекта по показателям, непосредственно характеризующим требуемые свойства. Также необходимо иметь возможность избирательно управлять этими свойствами.
При работе с сельскохозяйственными животными эта сложная задача решается несколько проще, чем с сельскохозяйственными растениями их семенами и плодами. Так получается в силу того, что имеется возможность более оперативно отслеживать результаты воздействия на животных и вносить корректировку в процесс управления. Ветврачи владеют специальными методиками, позволяющими оперативно отслеживать изменение состояния животного. К сожалению, в производственных условиях отсутствуют технические средства позволяющие решать аналогичные задачи применительно к растениям, их семенам. Поэтому желательно иметь математическую модель биологического объекта, описывающую изменение реакций семян и растений на внешние воздействия. Это в перспективе позволит подбирать те виды воздействия на объект, которые будут приносить больший технологический эффект, прогнозировать поведение объекта
Исследования различных авторов [1],[2] показывают, что существуют общие закономерности организации, развития и взаимодействия не только отдельных биологических объектов, но и всех процессов на земле. Поэтому предлагаемые принципы построения моделей биологических объектов могут быть использованы и для построения моделей сельскохозяйственных биологических объектов и, в частности, для построения моделей зерновки.
Одним из первых кибернетическую модель зерновки предложил М.М. Фомичев [3]. Его модель (рис.1) носит концептуальный характер, отражая общие подходы к построению модели зерновки, как биологического объекта.

Рис. 1 – Кибернетическая модель зерновки [3]
Однако она не может быть использована для математического моделирования процессов в зерновке, поэтому должна быть конкретизирована.
Прежде чем перейти к рассмотрению возможного варианта построения модели остановимся на принципах организации управляющих систем биологических объектов. Одним из основных принципов функционирования биологических систем является иерархичность. Как правило, различными исследователями выделяются три уровня иерархической связи внутри объекта [4] (три контура). Каждый из уровней (контуров) выполняет свои задачи в соответствии с целевой функцией энергетического характера. Каждому уровню соответствует своя оптимальная управляющая система.
Предложено [4] выделять три критерия оптимальности в соответствии, с которыми протекают жизненные процессы в биологической системе: поиск экстремума; поддержание заданного уровня; нахождение в заданном интервале.
Верхний уровень иерархии биологической системы задает условие функционирования для всех нижележащих ярусов. Это условие можно назвать алгоритмом поведения зерновки при различном сочетании климатических и агротехнических условий.
Второй уровень иерархии из множества приемлемых вариантов осуществляет активный поиск наилучшего энергетического состояния системы.
Третий уровень содержит два подуровня. Один из подуровней осуществляет поддержание управляемой величины на заданном значении, т.е. обеспечивает строго определенное поведение объекта в конкретных условиях (неспецифическая реакция организма). Второй подуровень обеспечивает поддержание управляемой величины в заданном диапазоне.
Следует отметить, что каждому иерархическому уровню соответствует свой выходной сигнал (своя управляемая величина). Так на третьем уровне – это концентрация отдельных ферментов. На втором – синтез отдельных белков. На верхнем уровне – производство биологически активных веществ, гормонов.
Взаимосвязь между уровнями осуществляется при помощи прямых и обратных связей. Поэтому для управляющей системы одного уровня характерно наличие нескольких типов входных воздействий и одного типа выходного (управляемой величины).
На одном уровне управления имеется целый комплекс взаимодействующих друг с другом и системами другого уровня элементарных управляющих систем. Каждая элементарная управляющая система отвечает за свой элементарный акт – вырабатывает конкретное регулирующее воздействие в зависимости от сигналов, поступающих на вход. Совокупность элементарных актов одного уровня образует функциональный единый процесс. Соответственно совокупность элементарных управляющих систем одного уровня образует единую управляющую систему функционального процесса. Структурная схема такой системы может иметь следующий вид (рис.2).

Рис. 2 - Структурная схема совокупности элементарных управляющих систем одного уровня: ЗО1 – задающий орган. Перепрограммируемый элемент, задающий необходимый уровень управляющего сигнала. Перепрограммирование осуществляется в зависимости от фазы развития семени или растения, требующего определенного метаболизма; ПО1 – преобразующий орган, позволяющий преобразовать выходной сигнал элемента сравнения ЭС, в сигнал, который воспринимается реагирующим органом РО1; ИО1 – исполнительный механизм, элемент системы вырабатывающий управляющий сигнал, в зависимости от вида и уровня воздействия; ПОО1 – преобразующий орган обратной связи, преобразует управляемую величину в сигнал «воспринимаемый» элементом сравнения. Через ПОО (без индекса) сигнал обратной связи подается на ЭС параллельных элементарных систем; ВО1 – воспринимающий орган, через который информация о внешнем воздействии поступает в систему; f1 – внешнее воздействие
Цифра 1 в индексации говорит о том, что элементарные системы относятся к одному уровню. В индексации между собой они отличаются количеством штрихов.
Следующий принцип, который необходимо учитывать при разработке модели биологического объекта касается соотношения темпов (скоростей) протекания реакций на различных уровнях иерархии. Шимурский А.В. и Кузьмин В.И. [5] получили, что соотношение темпов протекания биологических процессов на различных иерархических уровнях равно числу . Это заключение позволяет предположить, что данному соотношению подчиняются и постоянные времени систем управления различных уровней.
Важным положением, требующим отражения в модели, является задание и изменение восприимчивости системы управления к уровню входного сигнала [6]. Установлено, что в зависимости от величины входного сигнала наблюдается разный вид адаптационных реакций. Причем, чтобы произошел переход от одного вида реакции к другому, необходимо, чтобы новый сигнал был в 1,1 … 1,3 раза больше предыдущего[7],[8].
При разработке модели необходимо учитывать, что после получения системой входного сигнала, до появления выходного сигнала проходит время, необходимое для обработки и анализа информации.
Учитывая работы [9], [4] примем в качестве алгоритма функционирования модели зерновки алгоритм адаптивного случайного поиска. В этом случае при внешнем воздействии на зерновку на верхнем иерархическом уровне задаются настройки верхних критериев оптимальности для нижних уровней. Затем происходит определение величин целевых функций по каждому уровню. Их сравнивают с результатами предыдущего шага и заданным значением. В зависимости от результата сравнения принимается решение об изменении настройки величин критериев оптимальности.
Предлагаемая схема модели зерновки, как биологического объекта, может иметь следующий вид (рис.3).
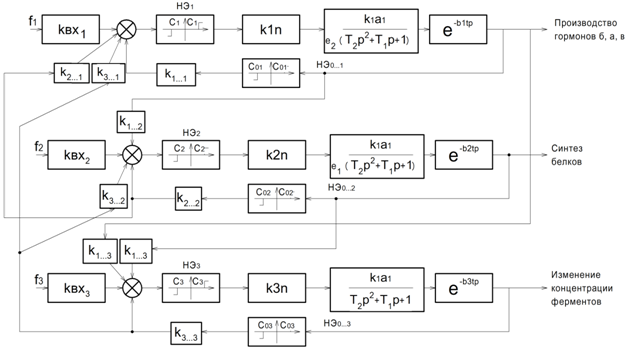
Рис. 3 – Примерная функциональная схема модели биологического объекта: Квх1, Квх2, Квх3 – передаточные функции воспринимающих органов на 1-м, 2-м и 3-м уровнях соответственно; К1П, К2П, К3П – передаточные функции преобразователей-усилителей; К1.2, К1.3, К2.1, К2.3, К3.2, К3.1 – передаточные функции преобразователей усилителей по каналам обратной связи между системами различных уровней; К1.1, К2.2, К3.3 – передаточные функции преобразователей-усилителей по каналам внутренних обратных связей; ![]() - передаточная функция исполнительного органа и объекта регулирования, элементов биологической системы непосредственно участвующих в выработке регулирующих сигналов и управляемых величин в зависимости от вида и уровня воздействия; НЭ1 – нелинейный элемент с зоной нечувствительности в канале управления; НЭос – нелинейный элемент с зоной нечувствительности в цепи обратной связи
- передаточная функция исполнительного органа и объекта регулирования, элементов биологической системы непосредственно участвующих в выработке регулирующих сигналов и управляемых величин в зависимости от вида и уровня воздействия; НЭ1 – нелинейный элемент с зоной нечувствительности в канале управления; НЭос – нелинейный элемент с зоной нечувствительности в цепи обратной связи
В соответствии оговоренной ранее иерархией структурная схема имеет три уровня управления, каждый из которых выполняет свои функции и работает в соответствии со своим критерием относительности.
Примечательно, что на каждом из уровней одновременно задействованы различные группы единых управляющих систем. Предлагаемая структурная схема является обобщенной. Она отражает только принцип построения управления по уровням. Приведём несколько пояснений по элементам схемы. На каждом уровне входная информация поступает от старших по иерархии управляющих систем, а также и от параллельно функционирующих элементарных управляющих систем и от иерархически младших элементарных управляющих систем сигнал поступает по обратным связям. Материальными носителями такой информации являются входные сигналы, имеющие различную природу: механическую, химическую, физическую [9]. На входы сравнивающих блоков должны поступать сигналы, которые можно сравнивать. Поэтому в модели применяются усилители-преобразователи. Коэффициент усиления по каждому входу не является величиной постоянной. Его значение определяет его «вес». Прохождение сигнала по любому из входов облегчает прохождение сигнала по этому входу, т.е. приводит к увеличению его значимости (увеличению коэффициента усиления).
В отличие от структурной схемы (рис.2) на приведенной функциональной схеме роль элемента сравнения выполняет релейный элемент (НЭ), с зоной нечувствительности С. Величина зоны нечувствительности не остается постоянной, она изменяется в зависимости от: состояния биологической системы на разных фазах развития растения и зерновки; величины входных воздействий, частоты их следования.
Преодоление зоны нечувствительности (порога срабатывания) происходит тогда, когда суммарное воздействие по всем каналам оказывается достаточным для его преодоления или достаточно велик уровень воздействия по одному из каналов.
В передаточной функции, описывающей динамические свойства исполнительного механизма и объекта управления, учтены следующие элементы концепции построения систем управления:
- соотношение времени переходных процессов по уровням иерархии. Это реализуется введением коэффициента в знаменатель передаточной функции;
- изменение типа адаптационной реакции. Это реализуется введением коэффициента а, в числитель передаточной функции. Величина этого коэффициента не остается постоянной, а изменяется в зависимости от величины воздействия.
Чтобы сформировалась реакция на какое-либо воздействие биологической системе необходимо время, которое определяется постоянными b, Т2, Т1 и временем чистого запаздывания . Их величины изменяются в зависимости от уровня в иерархии, уровня адаптационной реакции, функционального назначения единичной системы.
Наличие в канале управления системы нелинейного элемента НЭ предполагает возникновение автоколебательных процессов [10]. Одним из элементов их стабилизации являются нелинейные обратные связи. Поэтому в обратную связь элементарной управляющей системы введено нелинейное звено НЭо.с. с изменяющейся величиной зоны нечувствительности (Со.1., Со.2., Со.3.).
Предлагаемая структурная схема позволяет:
- оценивать биологический объект – зерновку, как адаптивную, самоорганизующуюся систему;
- разработать алгоритм исследования ответных реакций зерновки на внешние воздействия;
- по имеющимся экспериментальным данным идентифицировать иерархические уровни протекания ответных реакций;
- моделировать поведение зерновки при исследованных внешних воздействиях.
Список литературы / References
- Ляпунов А.А. Проблемы теоретической и прикладной кибернетики /А.А. Ляпунов. - М.: Наука, 1980. - 335 c.
- Анохин П.К. Принципиальные вопросы общей теории функциональ-ных систем /П.К.Анохин // Принципы системной организации функции:- М.: Наука,1973. - С. 5-61.
- Фомичев М.М. Кибернетическая модель зерновки / М.М. Фомичев // Вузовская наука – производству: Сб. научно-технич. разработок – М.:МИИСП, 1988.-С.89-91.
- Гринченко С.И. Феномены оптимизации, адаптации и эволюции в природных системах / С.И. Гринченко // Информационные процессы и системы: Сб. НТИ, сер. 2 – М.: ВИНИТИ, 1999.- С.20-30.
- Жирмунский А.В. Критические уровни в развитии природных систем / А.В. Жирмунский, В.И. Кузьмин: - Л.: Наука, 1990. - 223 с.
- Гаркави Л.Х. Адаптационные реакции и резистентность организма / Л.Х. Гаркави, Е.Б. Квакина, М.А. Уколова: - Ростов-на-Дону: издательство Ростовского университета, 1990. -223 c/
- Васильев А.Н., Северинов О.В. Информационно-термодинамический подход к контролю процесса активного вентилирования зерна /А.Н. Васильев, О.В. Северинов / Известия высших учебных заведений. - Северо-Кавказский регион. Серия: Технические науки. 2014. № 6 (181). С. 128-132.
- Vasiliev A.N., Ospanov A.B., Budnikov D.А.Controlling reactions of biological objects of agricultural production with the use of electrotechnology // International Journal of Pharmacy & Technology/Dec-2016 . Vol. 8. Issue No.4. 26855-26869
- Федоров В.И. Принципиальная организация управляющих систем организма / В.И. Федоров: http://www.ict.nsc.ru/ws/Lyap2001/1439 (дата обращения 25.06.2017).
- Мирошник И.В. Теория автоматического управления. Нелинейные и оптимальные системы/ И.В. Мирошник. – СПб.: Питер, 2006. – 272 с.
Список литературы на английском языке / References in English
- Ljapunov A.A. Problemy teoreticheskoj i prikladnoj kibernentiki [Problems of theoretical and applied cybernetics]/A.A. Ljapunov.- M.:Nauka, 1980. – 335 p. [in Russian]
- Anohin P.K. Principial'nye voprosy obshhej teorii funkcional'-nyh sistem [Principal questions of the general theory of functional systems]/P.K.Anohin // Principy sistemnoj organizacii funkcii [Principles of the system organization of the function]. - M.: Nauka,1973.-P.5-61. [in Russian]
- Fomichev M.M. Kiberneticheskaja model' zernovki [Cybernetic model of grain]/ M.M. Fomichev // Vuzovskaja nauka – proizvodstvu [University science - production]: Sb. nauchno-tehnich. razrabotok – M.:MIISP, 1988.-P.89-91. [in Russian]
- Grinchenko S.I. Fenomeny optimizacii, adaptacii i jevoljucii v prirodnyh sistemah [Phenomena of optimization, adaptation and evolution in natural systems] / S.I. Grinchenko //Informacionnye processy i sistemy [Information Processes and Systems]: Sb. NTI, ser. 2 – M.:VINITI, 1999.- P. 20-30 [in Russian]
- Zhirmunkij A.V. Kriticheskie urovni v razvitii prirodnyh sistem [Critical levels in the development of natural systems]/ A.V. Zhirmunskij, V.I. Kuz'min:- L.: Nauka, 1990. – 223 p. [in Russian]
- Garkavi L.H. Adaptacionnye reakcii i rezistentnost' organizma [Adaptation reactions and resistance of the body] / L.H. Garkavi, E.B. Kvakina, M.A. Ukolova: - Rostov-na-Donu: izdatel'stvo Rostovskogo universiteta [Publishing house of Rostov University], 1990.- 223 p. [in Russian]
- Vasiliev A.N., Severinov O.V. Informacionno-termodinamicheskij podhod k kontrolju processa aktivnogo ventilirovanija zerna Izvestija vysshih uchebnyh zavedenij [Information-thermodynamic approach to controlling the process of active grain ventilation]/ A.N.Vasiliev, O.V.Severinov. - Severo-Kavkazskij region. Serija: Tehnicheskie nauki [News of higher educational institutions. - The North Caucasus region. Series: Engineering science]. 2014. № 6 (181). P. 128-132 [in Russian]
- Vasiliev A.N., Ospanov A.B., Budnikov D.А.Controlling reactions of biological objects of agricultural production with the use of electrotechnology // International Journal of Pharmacy & Technology/Dec-2016 . Vol. 8. Issue No.4. 26855-26869
- Fedorov V.I. Principial'naja organizacija upravljajushhih sistem organizma [The principle organization of control systems of the body]/ V.I. Fedorov: http://www.ict.nsc.ru/ws/Lyap2001/1439 (accessed: 25.06.2017)[in Russian]
- Miroshnik I.V. Teorija avtomaticheskogo upravlenija. Nelinejnye i optimal'nye sistemy [Theory of automatic control. Nonlinear and optimal systems.]/ I.V. Miroshnik. – SPb.: Piter, 2006. – 272 p. [in Russian]