РАЗРАБОТКА И ВНЕДРЕНИЕ ПРОЕКТА «ПРИМЕНЕНИЕ НЕЧЕТКОЙ ЛОГИКИ ДЛЯ ОПТИМАЛЬНОГО РАЗМЕЩЕНИЯ КОМПЕНСИРУЮЩЕГО УСТРОЙСТВА»
Альдженди И.Р.1, Виноградов А.А.2
1Магистрант 2 курса, 2Кандидат технических наук, Белгородский государственный технологический университет им. В.Г. Шухова .
РАЗРАБОТКА И ВНЕДРЕНИЕ ПРОЕКТА «ПРИМЕНЕНИЕ НЕЧЕТКОЙ ЛОГИКИ ДЛЯ ОПТИМАЛЬНОГО РАЗМЕЩЕНИЯ КОМПЕНСИРУЮЩЕГО УСТРОЙСТВА»
Аннотация
Эта статья описывает результаты исследования по использованию контроллера нечеткой логики для выбора оптимального размещения компенсатора в радиальной электрической сети с целью уменьшения падения напряжения и снижения потерь мощности.
Ключевые слова: контроллер нечеткой логики, размещение компенсатора, снижение потери мощности.
Al'dzhendi I.R.1, Vinogradov A.A.2
1Master, 2PhD in Engineering, Belograd State Technical University
USING FUZZY LOGIC FOR THE OPTIMAL PLACEMENT OF THE COMPENSATING DEVICES
Abstract
This paper describes the results of using fuzzy logic controller to select the optimal placement of the compensator in a radial electric networks in order to reduce the voltage drop and to reduce the power loss.
Keywords: fuzzy logic controller, placement of compensator, reduce power losses.
Проблема размещения компенсатора реактивной мощности в электрической сети широко обсуждается в технической литературе, особенно с начала 1980 года. В последние годы найти решение данной проблемы пытаются с помощью методов искусственного интеллекта [5].
Нечеткая логика используется для решения проблемы оптимального размещения компенсатора и дает хорошие результаты [3].
Нечеткая логика
В [1, с. 1] дается следующее объяснение контроллера нечеткой логики: «В течение последних десятилетий нечеткая логика управления была одной из самых активных и плодотворных областей исследования в области приложения теории нечетких множеств».
Нечеткая логика управления структуры системы состоит из следующих основных частей: фаззификация; база правил; алгоритмы вывода; дефаззификация.
Определение оптимального размещения компенсатора с использованием нечеткого подхода
В данной работе нечеткая логика используется не только с целью снижения потери мощности в сети, но также для уменьшения падения напряжения. Система нечеткого вывода, содержащая набор правил, используется для определения индекса подходящего расположения компенсатора для каждого узла в распределенной системе. Компенсаторы должны размещаться в узлах с наибольшим индексом (CSI). Построим контроллер нечеткой логики в MATLAB. Функции принадлежности контроллера нечеткой логики показаны на рис.( 1-3).
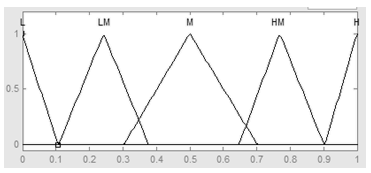
Рис. 1 - Функция принадлежности индекса снижения потерь мощности
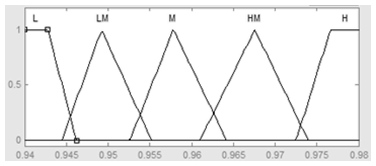
Рис. 2 - Функция принадлежности напряжения в узлах
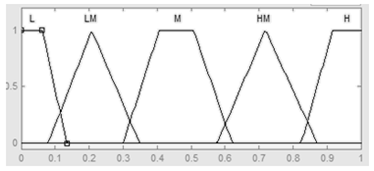
Рис. 3 - Функция принадлежности индекса подходящего местоположения компенсатора
Сначала необходимо определить величины потерь активной и реактивной мощности с помощью программы RS-3 (программа для расчета установившегося режима). Cнижение потерь мощности линейно нормализуются в интервале [0, 1] с наибольшим значением снижения потерь равным 1, и наименьшим значением равным 0. Индекс значения потерь получен из уравнения [4]:
![]()
Принцип метода нечеткой логики представлен на( рис. 4).
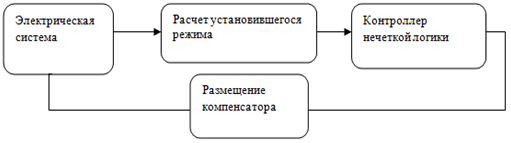
Рис. 4 - Принцип метода нечеткой логики
Индекс потери мощности (PLI) и Напряжение V для каждого узла являются входными сигналами котроллера нечеткой логики, индекс подходящего местоположения компенсатора (CSI) является выходным сигналом. Структура нечеткого регулятора показана на( рис. 5).
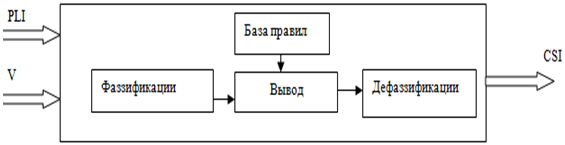
Рис. 5 - Структура нечеткого регулятора
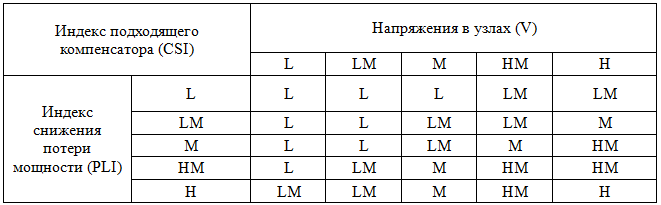
Лингвистические переменные определены как {L, LM, M, H, HM}, где L означает малое, LМ – малое среднее, М – среднее, НМ – большое среднее и Н – большое значение переменной. Выберем треугольные и трапециевидные функции для представления лингвистических переменных. Правила, предлагаемые для контроллера, показаны в (табл. 1).
Таблица 1 - Правила контроллера нечеткой логики
Моделирование электрической сети и результаты нечеткого управления
Для изучения эффективности использования нечеткого контроллера с целью определения оптимального места для размещения компенсатора реактивной мощности была выбрана сеть 10 кВ, состоящая из пяти узлов, причем в каждом узле имеется индуктивная нагрузка (рис. 6). Для расчета установившегося режима использована программа RS-3.

Рис. 6 - Исследуемая сеть
Все длины показаны на рисунке в км, а нагрузки в МВА. С помощью программы RS-3 получены значения потерь мощности и напряжения в каждом узле.
Получены потери мощности в сети без компенсатора. Затем установлены компенсаторы (Q = 0,5 МВар) в первом, втором, третьем, четвертом и пятом узлах, и рассчитаны потери в сети. В соответствии с уравнением (1) рассчитан индекс потери мощности (PLI) для каждого узла в сети. Потери мощности в сети без компенсатора составили 65,99 кВт. Результаты, полученные при размещении компенсатора во всех узлах, показаны в (табл. 2).
Таблица 2 - Расчет установившегося режима

Полученные результаты использованы как входные сигналы контроллера нечеткой логики. В результате мы получаем индекс подходящего расположения компенсатора (CSI). Узел, имеющий самый высокий индекс, является наилучшим местом для размещения компенсатора. Индекс подходящего месторасположения компенсатора (CSI) является выходным сигналом контроллера нечеткой логики. Результаты показаны в (табл. 3).
Таблица 3 - Значения индексов подходящего расположения компенсатора

Из полученных результатов отметим, что лучшее место для размещения компенсатора находится в пятом узле, где значение индекса выше (CSI = 0,5), потери мощности наименьшие, а напряжение в узле наибольшее. На (рис. 7), показаны потери мощности в сети без компенсатора и после компенсации реактивной мощности в пятом узле.

Рис. 7 - Потери мощности в сети без компенсатора и после компенсации
Заключение
Исходя из проведенного исследования и сделанных нами выводов, мы предлагаем использовать нахождение оптимального расположения компенсатора реактивной мощности с использованием контроллера нечеткой логики не только для повышения напряжения сети и снижения потери мощности, но и для оптимального уменьшения гармоники напряжения и тока.
Литература
- Abdel Ghani Aissaoui, Ahmed Tahour // Application of Fuzzy Logic in Control of Electrical Machines. – 2010. – С. 23.
- Brahim GASBAOUI, Abdelkader CHAKER /Optimal Placement and Sizing of Capacitor Banks Using Fuzzy-Ant Approach in Electrical Distribution Systems. – 2010. – С. 2–5.
- K.Sandhya, Dr.A.Jaya Laxmi, Dr.M.P.Soni / Optimal Voltage Regulators Placement in Radial Distribution System Using Fuzzy Logic. – 2013. – С. 2–6.
- Neha Goyal, Pushpendra Singh /Optimal Placement of Capacitors in Radial Distribution System to Minimizes the Losses at Variable Load Levels. – 2014. – С. 2–4.
- Sheeraz kirmani, Md. Farrukh Rahman, Chakresh Kumar / Loss Reduction in Distribution System Using Fuzzy Techniques. – 2010. – С. 2–4.