РАЗРАБОТКА ГАЗОВЫХ СЕНСОРОВ С НИЗКИМ ЭНЕРГОПОТРЕБЛЕНИЕМ ДЛЯ БЕСПРОВОДНЫХ ЭНЕРГОНЕЗАВИСИМЫХ СЕНСОРНЫХ СЕТЕЙ ("УМНАЯ ПЫЛЬ")
Ку Т.Ф.
Аспирант, Московский авиационный институт
РАЗРАБОТКА ГАЗОВЫХ СЕНСОРОВ С НИЗКИМ ЭНЕРГОПОТРЕБЛЕНИЕМ ДЛЯ БЕСПРОВОДНЫХ ЭНЕРГОНЕЗАВИСИМЫХ СЕНСОРНЫХ СЕТЕЙ ("УМНАЯ ПЫЛЬ")
Аннотация
В статье представлены конструктивно-технологические принципы создания беспроводных сенсорных узлов, обеспечивающих интеграцию газовых сенсоров различного типа, их автономное питание и саморазвертывание сенсорной сети. В процессе работы был выполнен аналитический обзор, проведен патентный поиск известных технических решений, выбран оптимальный вариант решения задач, разработаны конструктивно-технологические принципы создания беспроводных сенсорных узлов, обеспечивающих интеграцию газовых сенсоров различного типа и варианты возможных схемотехнических решений по созданию экспериментальных образцов универсальных цифровых платформ для систем промышленной безопасности и экологического мониторинга.
Ключевые слова: автономный беспроводной датчик, угарный газ, концентрация газа, электрохимический сенсор, беспроводный сенсорный сетей.
Cu T.Ph.
Postgraduate student, Moscow Aviation Institute
DEVELOPMENT OF GAS SENSOR WITH LOW POWER FOR NONVOLATILE WIRELESS SENSOR NETWORKS ("SMART DUST")
Abstract
The article considers constructive and technological principles of creation of the wireless sensor nodes providing integration of gas sensors of different type, their self-contained supply and self-deployment of a sensor network. During this process the state-of-the-art review was executed, patent search of known technical solutions is carried out, the optimum candidate solution of tasks is selected, the constructive and technological principles of creation of the wireless sensor nodes providing integration of gas sensors of different type and versions of possible circuitry decisions on creation of the experimental samples of the universal digital platforms for systems of industrial safety and environmental monitoring are developed.
Keywords: autonomous wireless gas sensor node, carbon monoxide, gas concentration, electrochemical sensor, wireless sensor networks.
«Умная пыль» - термин, появившийся в 2001 году благодаря Кристоферу Пистеру (Kristopher Pister) и относящийся к миниатюрным устройствам с возможностью самоорганизации. Теоретически, такие устройства должны быть мкм или нм размера, должны уметь детектировать разные физические явления, обрабатывать их и передавать результаты по беспроводному каналу пользователю.
1.1 конструкция беспроводных энергонезависимых сенсорных сетей.
Основными элементами сенсорного модуля являются: микропроцессорный модуль, ячейка памяти, беспроводной передатчик, источник питания и один или несколько датчиков (рисунок 1.).

Рисунок 1. - Типовая архитектура беспроводных энергонезависимых сенсорных сетей.
Источником питания, как правило, служат обычные батарейки. Однако, в последнее время появились платформы, использующие суперконденсаторы, альтернативные источники питания, а иногда и комбинации всех вышеперечисленных вариантов. В качестве микропроцессорного модуля обычно используются микроконтроллеры, которые представляют собой компромисс между вычислительными способностями, быстродействием и энергопотреблением, что является важным фактором для беспроводных сенсорных сетей.Беспроводные передатчики часто работают на основе стандарта IEEE802.15.4 и спецификации ZigBee, которые, будучи малопотребляющими, способны передавать информацию в среднем на 30-50 м. Самыми популярными детекторами являются датчики температуры, влажности и акселерометры. В зависимости от применения разработчики добавляют или используют дополнительные или перефирийные устройства (ЦАП, АЦП, светодиоды, интерфейсы SPI/I2C/UART и др.).
1.2 Основные характеристики«умной пыли»
Основные требования, предъявляемые к «умной пыли»:
- Размер. Теоретически, как было отмечено ранее, сенсорные модули должны быть микро- или нано-размера. На практике, современные сенсорные модули представляют из себя печатную плату размером с сигаретную пачку или ее половину с установленными электронными компонентами. Это касается как первых сенсорных модулей TelosB[1],Mica/Mica2/MicaZ [2] так и современных WaspMote [3], FlyPort [4]. Несмотря на большой прогресс в области интеграции компонентов как на кристалле, так и на печатной плате, лишь несколько платформ можно рассматривать как действительно миниатюрные: PicoCube (1 см3) [5]и модуль на основе MEMS технологии (3.9 x9 x 3.5 мм) [6]. Сенсорные модули будут описаны более подробно в следующих главах.
- Детектирование внешних событий и явлений.Это основная цель «умной пыли». Для ее осуществления используются датчики. Однако, из-за сравнительно большого энергопотребления некоторых сенсоров (например, каталитических/полупроводниковых для обнаружения утечек газов) круг реальных применений сенсорных модулей часто ограничен использованием сенсоров температуры и влажности. Проблема автономного питания является краеугольной для сенсорных модулей и беспроводных сенсорных сетей в целом.
- Автономное питание. Источником питания сенсорных модулей в большинстве случаев являются две последовательно соединенные батареи 1.5 В АА-типа. Однако, существует множество сенсорных платформ, которые используют альтернативную энергию солнца, электромагнитных волн, вибраций. Собранная энергия сохраняется в супер конденсаторах и/или перезаряжаемых батареях. Последним трендом является применение гибридных источников питания - сбор альтернативной энергии разных типов одновременно и ее сохранение в элементах питания сенсорного модуля. Например, такой подход продемонстрирован в работе [7], где сенсорный модуль может работать от солнечной энергии, энергии ветра и топливной батареи, а также перезаряжать суперконденсатор и литиевый элемент питания от вышеназванных природных источников.
- Беспроводная связь. Философия «умной пыли» предполагает повсеместное применение сенсорных модулей и проведения измерений физических параметров среды, но не везде возможно провести кабель связи. Вследствие этого, сенсорные модули должны передавать измеренные значения к пользователю по беспроводному каналу от одного модуля к другому, используя подход беспроводной ячеистой сети (mesh networking). С самого первого появления сенсорных модулей использовалась беспроводная технологий ZigBee, поддерживающая стандарт IEEE 802.15.4. Выбор в ее пользу был сделан из-за малого энергопотребления, поддержки технологии mesh-networking и работы в нелицензируемом диапазоне 2.4 ГГц. Однако, на практике ученые и производители столкнулись с проблемой синхронизации беспроводных чипов: если в сети присутствуют сенсорные модули с беспроводными ZigBee чипами разных производителей, то настройка синхронизации становится чрезвычайно сложной из-за разной модуляции, скорости передачи данных даже несмотря на поддержку стандарта и спецификации ZigBee. Не синхронизированные модули в этом случае либо практически бесполезны, либо потребляют много энергии, пытаясь связаться с другими модулями. На данный момент активно обсуждаются возможности перехода на другие беспроводные технологии такие как SigFox (http://www.sigfox.com), LoRa (http://www.semtech.com/wireless-rf/lora.html) и последнюю версию Bluetooth, поддерживающую mesh-networking. Первые две технологии являются энергоэффективнее ZigBee устройств и способны передавать данные на несколько километров. Некоторые коммерческие компании, такие как Worldsensing (http://www.worldsensing.com/), активно занимающиеся «беспроводный энергонезависимый сенсорный сеть» и развертыванием беспроводных сетей для реальных применений (обслуживание парковок, мониторинг сохранности мостов) перешли с ZigBbee на SigFox и LoRa.
- «Умные» алгоритмы, обеспечивающие само настройку устройства в зависимости от внешних условий, требований головного устройства (например, центрального узла беспроводной сети) и ресурсов непосредственно устройства, алгоритмы для обработки измеренных данных и их конвертации в необходимый формат данных.
В статье мы рассмотрим платформы «умной пыли» с точки зрения приведенных требований.
1.3 Платформы «умной пыли»
В данной главе мы произведем обзор существующих платформ «умной пыли», а именно сенсорных модулей и беспроводных сенсорных сетей на их основе.
1.3.1 Первые Платформы «Умной Пыли»
Одними из первыхплатформ ББС считаются сенсорные модули TelosB [1] и семейство модулей MICA (MICA/MICA2/MICAz) [2] [8] показанные на рисунке 2.
 a)
a) |
 б)
б) |
 в)
в) |
| Рисунок 2 - Первые прототипы ББС: сенсорные модули (а) TelosB, (б) MICA2 (в) MICAz | ||
Эти модули были разработаны при американских университетах и в первое время служили для экспериментирования как на уровне сенсорных модулей, так и на уровне небольших беспроводных сенсорных сетей для отладки режимов работы модулей, оптимизацией их энергопотребления, экспериментирования с протоколами связи и синхронизации. Основным элементом сенсорных модулей служит малопотребляющий микроконтроллер (МК) компаний Texas InstrumentsMSP430 или AtmelATmega128. Беспроводные приемопередатчики, как правило, построены на основе стандарта IEEE802.15.4 и спецификации ZigBee. Что касается элементов питания, то сенсорные модули питаются от двух пальчиковых батарей типа АА с номинальным напряжением 1.5 В каждого элемента. Все вышеперечисленные модули оснащены операционной системой TinyOS [9], [10],которая по задумке разработчиков должна была значительно упростить работу пользователя с платформами и, в частности, облегчить программирование сенсорных модулей.Модуль TelosB легко программировался через USB интерфейс. Кроме экспериментирования, такие сенсорные модули использовались и для индустриальных применений: контроль и экономия осветительной электроэнергии в тоннелях [11], мониторинг исторических зданий на предмет деформации и влияния окружающей среды [12].
Последующие платформы, например, BTnode [13], разработанная в Швейцарской Высшей Технической Школе Цюриха (ETHZ), не отличались значительно в техническом и функциональном плане. BTnode отличался отпервых платформ лишь тем, что был оснащен Bluetooth технологией передачи данных, которая легко позволяла связать сенсорные модули с мобильным телефоном. Телефон мог выполнять как функции сенсорного модуля, так и функции концентратора, который аккумулирует информацию и измеренные данные со всех сенсорных устройств беспроводной сенсорной сети.
Вскоре после выхода первых прототипов «умной пыли» и проведения первых экспериментов по измерению физических параметров и передачи данных на большие расстояния, используя беспроводные сенсорные сети, ученые осознали, что проблема энергопотребления является крайне важной.Двух стандартных пальчиковых батарей АА-типа не хватает на несколько месяцев для автономного функционирования сенсорных модулей. Радио передатчики потребляют большой ток во время приема и передачи данных, а также синхронизации с соседними модулями или концентратором. Некоторые сенсоры, например, газовые, также потребляют значительную мощность.
1.3.2 Современные платформы «умной пыли»
В данной главе мы рассмотрим современные платформы «умной пыли». Так как на данный момент существует несколько сотен решений, то этот обзор мы условно разделим на три части, в которых рассмотрим следующие популярные платформы:
- Коммерческие платформы, пришедшие на смену первым массовым сенсорным модулям TelosB, MICA2 и MICAz.
- Платформы, релевантные настоящему проекту по разработке беспроводных сенсорных сетей для систем промышленной безопасности и экологического мониторинга.
- Платформы с интересным техническим решением.
Коммерческие и массовые сенсорные модули для экспериментирования, пришедшие на смену первым платформам, (а) изменились внешне – как ни парадоксально стали больше и (б) стали предлагать намного больше сервисов. Что касается внешнего вида, то типовой сенсорный модуль стал «модульным»: платформа начинается с «материнской платы», к которой можно подключать другие платы (с сенсорами, беспроводными технологиями, технологиями обработки данных), наращивая платформу вертикально. Основная философия новых платформ – это предоставить пользователю любую конфигурацию сенсорного модуля, как в аппаратном, так и в программном смыслах, при этом максимально «используя» ресурсы платформы. Двумя характерными сенсорными модулями такого типа являются Waspmote [3]и Flyport [4], изображенные на рисунке 3.
 а) а) |
 б) б) |
| Рисунок 3 - Коммерческие сенсорные модули (а) Waspmote и (б) FlyPort | |
Самый простой Waspmote модуль может включать только одну базовую («материнскую») плату. Она включает в себя весь базовый функционал – микроконтроллер, беспроводной приемопередатчик (поддерживается 15 беспроводных технологий), внешняя память, сенсоры по умолчанию (температура, акселерометр), разъемы расширения. Из этого следует, что модуль при самой простой конфигурации может делать измерения и передавать данные по беспроводному каналу. Опытный пользователь может подключить необходимые датчики через разъемы расширения. Однако, компания-разработчик Libelium предусматривает расширение возможностей платформы за счет присоединения специализированных плат с датчиками под определенные применения.Libelium предлагает два варианта концентраторов. В первом случае концентратором служит ПК пользователя, в который вставляется миниатюрная плата-расширитель с USB интерфейсом и беспроводной технологией используемой в сенсорной сети. В этом случае данные централизованно собираются на ПК. Во втором случае в качестве концентратора служит беспроводной модуль Meshlium [14]. Этот концентратор оснащен операционной системой, базой данных, возможностью отправки данных в «облако» (cloud) и другими возможностями. Таким образом, пользователь может подобрать все необходимые аппаратные и программные средства для определенного применения, используя доступные средства.
Основную плату FlyPort называют «Nest» (гнездо – англ.), на которой установлены только разъемы для датчиков и разъем для карты памяти. На «гнездо» пользователь может соединить только одну из трех плат-расширителей по числу поддерживаемых технологий передачи данных (WiFi, GPRS, Ethernet), где кроме приемо-передатчика установлен и микроконтроллер. Компания-разработчик OpenPicus считает, что беспроводные сети с узловой конфигурацией не оправдывают себя для настоящих индустриальных применений и поддерживают только технологии передачи данных, где они могут быть доставлены сразу пользователю, минуя концентратор, который потребляет сравнительно большую мощность во время работы. Но поддерживаемый стандарт IEEE802.11.g предусматривает возможность передачи сообщений отмодуля к модулю. FlyPortявляется платформой с самой простой настройкой беспроводного соединения WiFi. Единственным недостатком является то, что если датчик не поддерживается платформой (на данный момент поддерживаются несколько десятков датчиков, включая газовые), то его установка будет нетривиальной.
Для программирования обоих платформ используется среда разработки с уже готовыми библиотеками и интерфейсами под каждый электронный компонент (датчик, приемо-передатчик), а также примеры кода для реализации базовых алгоритмов измерения, передачи/приема данных и организации беспроводной сети.
Сенсорными платформами, релевантными данному проекту, являются платформы способные детектировать пожары, опасные газы (токсические взрывоопасные) и передавать данные по беспроводному каналу посредством беспроводных самоорганизующихся сенсорных сетей. При разработке сенсорного модуля многое (в том числе энергопотребление, размер, методология проведения измерений) зависит от технологии изготовления датчика для обнаружения газов. На данный момент, обнаружение газов беспроводными сенсорными модулями выполняется при помощи трех основных типов датчиков: пленочные, оптические и полупроводниковые/каталитические.
Колоритмические пленочные датчики являются популярными для использования в сенсорных модулях. Они отличаются малым потреблением мощности (~4 мВт) и могут быть изготовлены в миниатюрном типоразмере, например 0603 монтажа на поверхность [15]. Датчик такого типа применен в автоматическом газовом детекторе[16], который состоит из двух плат – коммерческой платформы MICA2Dot c микроконтроллером и радиопередатчиком и тестовой платы с установленным датчиком. Датчик представляет из себяизлучатель, который направляет поток света на фотодетектор через колоритмическую пленку. При появлении опасного газа цвет пленки меняется, что в свою очередь изменяет поток свет, принятый фотодетектором. Если измеренная величина превышает установленный порог, значение которого хранится в памяти микроконтроллера, то это значение или сигнал опасности передается пользователю при помощи радиопередатчика и инфраструктуры беспроводной сенсорной сети.
iWENN сенсорный модуль представленный в исследовательской работе [17], как и предыдущая платформа, состоит из коммерческого сенсорного модуля TIP710C компании Maxfor и тестовой платы с пленочным датчиком, основанный на SnO2-CuO пленке с чувствительным слоем SnO2-Pt. В присутствии газа сопротивление пленки меняется. Это изменение по амплитуде, однако, достаточно малое и для его обнаружения микроконтроллером используется усилитель. Принцип действия одинаков и при детектировании газов колоритмическимдатчиком – если пороговое значение превышено, то это измерение или сигнал тревоги передается по сети пользователю. Обе сенсорные системы [16] [17], основанные на пленочных датчиках отлично подходят под автономную концепцию работы беспроводных сенсорных сетей, имея малое энергопотребление и физический размер. Но ряд недостатков, присущих датчикам пленочного типа, не позволяют использовать их в реальных условиях и применениях требующих выполнения норм стандартов. Например, пленочные датчики, как правило, имеют достаточно долгий отклик в размере нескольких минут, что не удовлетворяет стандартам, требующим проведение измерений каждые 20 секунд.
Сенсорные платформы на основе оптических датчиков, напротив, обладают быстрым откликом, способны обнаруживать очень малые концентрации газов, но являются чрезмерно энергопотребляющими для концепции беспроводных сенсорных сетей. Сенсорный модуль, разработанный в работе [18],способен обнаружить большое количество опасных газов, имея малое время отклика. Энергопотребление датчика составляет 800 мА (без учета потребления радиопередатчика и процессорной части), что делает большинство систем мониторинга на основе оптических датчиков не пригодными для автономных систем.
Компромиссом между пленочными и оптическими датчиками для применения в беспроводных сенсорных сетях служат полупроводниковые и каталитические датчики, которые потребляют меньше мощности при работе, чем оптические датчики, и имеют достаточно быстрый отклик в пределах нескольких секунд, что превосходит скорость отклика пленочных датчиков. Каталитические и полупроводниковые датчики работают на принципе нагрева чувствительно слоя датчика, который меняет свое сопротивление при появлении газа в атмосфере. Изначально эти типы датчиков потребляют достаточно много мощности при нагреве (до 600 мВт), но в последние несколько лет появились решения по снижению энергопотребления, адаптированные специально для применения в рамках «умной пыли». К таким решениям относится импульсный режим нагрева сенсора, представленный в работе [19]. Экспериментальный образец модуля показан на рисунке 4а. Основная идея заключается в применении широтно-импульсной модуляции при измерениях. Однако, у этого метода есть два серьезных недостатка: (а) полупроводниковый/каталитический сенсор может быстро выйти из строя при слишком высокой частоте включения и выключения нагревающего напряжения, (б) только определенная скважность импульсов позволяет добиться экономии энергии при нагреве – если промежуток между нагревающими импульсами слишком растянут по времени, то датчик успевает остыть и следующий импульс вынужден нагревать его до предыдущей температуры. Схожий импульсный метод нагрева датчика был применен и в беспроводном сенсорном модуле в работе [20], который был специально разработан для обнаружения пожаров на ранних стадиях посредством детектирования пиролиза. Однако, отличительной чертой этой системы для детектирования пожаров и взрывоопасных газов является применение дополнительного модуля, способного собирать солнечную природную энергию и запасать ее в суперконденсаторах и литиевой батарее.
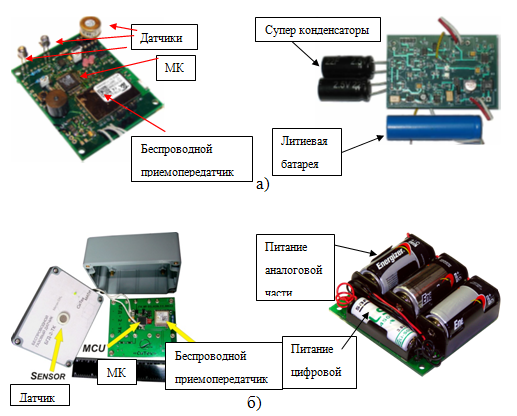
Рисунок 4- Беспроводные сенсорные платформы для детектирования пожаров и утечек газов: (а) модуль для детектирования пожаров на ранних стадиях и утечек газов (слева) с источником питания (справа) на основе суперконденсаторов, литиевой батареи и возможностью сбора солнечной энергии, (б) модуль для детектирования утечек метана (слева) с двойным источником питания (справа) для аналоговой и цифровой частей системы.
Отметим, что в двух предыдущих сенсорных устройствах [19] [20], датчики были включены в мостовую схему измерения, требующую два сенсора – один с катализатором, другой без. Такой подход к измерению, очевидно, является слишком энергозатратным – что особенно критично для автономных устройств «умной пыли». Поэтому для уменьшения энергопотребления были разработаны беспроводные модули, использующие один каталитический датчик и адаптированную для него процедуру измерения. Более подробная информация по измерительным схемам на одноми двух датчиках, а также их сравнение, представлена в исследовательской работе [21]. Практически, такой сенсорный модуль представлен в работе [22]и показан на рисунке 4б. Его характерными особенностями являются: (а) двойной источник питания – аналоговый для датчика и цифровой для беспроводного передатчика и микроконтроллера, (б) 4-х стадийный нагрев датчика. Новая методология нагрева заключается в том, что позволяет проводить измерения только с одним датчиком, значительно экономя энергию. Второй датчик эмулируется двумя импульсами нагрева датчика до 200 ºС. Полученный результат отклика вычитается из первых двух импульсов нагрева датчика до 450 ºС.
Выводы
В этом разделе мы рассмотрели сенсорные узлы, универсальные цифровые сенсорные платформы и алгоритмы по самоорганизациибеспроводных сенсорных платформ. Как показывают результаты, на данный момент существует большое количество сенсорных платформ, которые разрабатываются, как правило, либо для определенных задач, либо для решения универсальных задач по мониторингу и контролю окружающей среды. Платформы второго типа являются, в большинстве случаев, коммерческими: они часто имеют базовую (материнскую) плату функциональные возможности которой могут быть существенно дополнены посредством подключения плат-расширений.
Исследовательские прототипы разрабатываются под определенную задачу или для проверки определенной теории. Несмотря на большое количество платформ, проблема автономной работы и низкого энергопотребления полностью не решена – особенно это касается платформ для контроля взрывоопасных и ядовитых газов, где применяются датчики с высоким энергопотреблением.
Основные направления в решении этой задачи заключаются в разработке энергоэффективных методов измерения, разработке низкопотребляющих схем и архитектуры сенсорного модуля, применении технологий по сбору природной энергии. Парадоксальным является тот факт, что с момента появления беспроводных сенсорных платформ их физический размер не уменьшился, а в большинстве коммерческих платформах наблюдается увеличение: если первые коммерческие платформы были размером с пол сигаретной пачки, то современные увеличились вдвое. Следовательно, два основных вывода по платформам – это необходимость уменьшения их энергопотребления и физических размеров для реализации применения беспроводных сенсорных устройств в труднодоступных местах.
Литература
- TelosB сенсорная платформа «умной пыли»: http://www.willow.co.uk/TelosB_Datasheet.pdf (дата обращения 11.12.2014).
- MICA2 сенсорная платформа «умной пыли»: http://www.eol.ucar.edu/isf/facilities/isa/internal/CrossBow/DataSheets/mica2.pdf
- WaspMote сенсорная платформа «умной пыли»: http://www.libelium.com/products/waspmote/ (дата обращения 11.12.2014).
- FlyPort сенсорная платформа «умной пыли»: http://www.openpicus.com.
- Yuen Hui Chee, M. Koplow, M. Mark, N. Pletcher, M. Seeman, F. Burghardt, D. Steingart, J. Rabaey, P. Wright, S. Sanders, “PicoCube: A 1cm3 sensor node powered by harvested energy,” in Proc. DAC, 2008, pp.114-119.
- J. Lu, H. Okada, T. Itoh, T. Harada, R. Maeda, R., “Towards the world smallest wireless sensor nodes with ultra-low power consumption,” IEEESensors J., vol.14, no.6, pp.2035-2041, June 2014.
- M. Magno, D. Boyle, D. Brunelli, B. O'Flynn, E. Popovici, L. Benini, “Extended wireless monitoring through intelligent hybrid energy supply,” IEEE Trans. onInd. Electron., vol.61, no.4, pp.1871-1881, April 2014.
- MICAz сенсорная платформа «умной пыли»: http://www.openautomation.net/uploadsproductos/micaz_datasheet.pdf (дата обращения 11.12.2014).
- TinyOS – операционная система для беспроводных сенсорных модулей «умной пыли»: http://www.tinyos.net/.
- P. Levis, S. Madden, J. Polastre, R. Szewczyk, K. Whitehouse, A. Woo, D. Gay, J. Hill, M. Welsh, E. Brewer, and D. Culler, “Tinyos: An operating system for sensor networks,” in Ambient Intelligence, W. Weber, J. Rabaey, and E. Aarts, Eds. Springer Berlin Heidelberg, 2005, pp. 115–148.
- L. Mottola, G. P. Picco, M. Ceriotti, Ş. Gunǎ, and A. L. Murphy. 2010. Not all wireless sensor networks are created equal: A comparative study on tunnels. ACM Trans. Sen. Netw. 7, 2, Article 15 (September 2010), 33 pages.
- M. Ceriotti, L. Mottola, G.P. Picco, A.L. Murphy, S. Guna, M. Corra, M. Pozzi, D. Zonta, P. Zanon, "Monitoring heritage buildings with wireless sensor networks: The Torre Aquila deployment," International Conference onInformation Processing in Sensor Networks, 2009. IPSN 2009, pp.277-288, 13-16 April 2009.
- BTnode сенсорная платформа «умной пыли»: http://www.btnode.ethz.ch/(дата обращения 11.12.2014).
- Meshlium – беспроводной концентратор сенсорной сети: http://www.libelium.com/products/meshlium/.
- C.Peter, S.Schulz, M.Barth, M.Gempp, S.Rademacher, J.Wollenstein, “Low-cost roll-to-roll colorimetric gas sensor system for fire detection,” 2013 Transducers & Eurosensors XXVII: The 17th International Conference onSolid-State Sensors, Actuators and Microsystems, pp.2632-2635, 16-20 June 2013.
- S.Beirne, K.T.Lau, B.Corcoran, D.Diamond, “Automatic reaction to a chemical event detected by a low-cost wireless chemical sensing network,” 2009 IEEESensors, pp.69-72, 25-28 Oct. 2009.
- Y.W. Kim, S.J. Lee, G.H. Kim, G.J. Jeon, “Wireless electronic nose network for real time gas monitoring system,” in Proc. ROSE, 2009, pp. 169–172.
- S. So, F. Koushanfar, A. Kosterev, F. Tittel, “LaserSPECks: Laser SPECtroscopic Trace-Gas Sensor Networks - Sensor Integration and Applications,” 6th International Symposium on Information Processing in Sensor Networks, pp.226-235, 25-27 April, 2007.
- A. Somov, A. Baranov, A. Savkin, D. Spirjakin, A. Spirjakin, and R. Passerone. Development of wireless sensor network for combustible gas monitoring. Elsevier Journal on Sensors and Actuators, A: Physical 171(2): 398-405, 2011.
- A. Somov, D. Spirjakin, M. Ivanov, I. Khromushin, R. Passerone, A. Baranov, and A. Savkin. Combustible gases and early fire detection: an autonomous system for wireless sensor networks. In Proceedings of the First ACM International Conference on Energy-Efficient Computing and Networking (e-Energy’10), pp. 85-93, Passau, Germany, April 13-15, 2010.
- A. Somov, A. Baranov, D. Spirjakin, R. Passerone. Circuit design and power consumption analysis of wireless gas sensor nodes: one-sensor versus two-sensor approach. IEEE Sensors Journal 14(6): 2056-2063, 2014.
- A. Somov, A. Baranov, A. Savkin, M. Ivanov, L. Calliari, R. Passerone, E. Karpov, and A. Suchkov. Energy-aware gas sensing using wireless sensor networks. In Proceedings of the 9th European Conference on Wireless Sensor Networks (EWSN’12), LNCS vol. 7158, pp. 245-260, Trento, Italy, February 15-17, 2012.
References
- TelosB sensornaja platforma «umnoj pyli»: http://www.willow.co.uk/TelosB_Datasheet.pdf (дата обращения 11.12.2014).
- MICA2 sensornaja platforma «umnoj pyli»: http://www.eol.ucar.edu/isf/facilities/isa/internal/CrossBow/DataSheets/mica2.pdf
- WaspMote sensornaja platforma «umnoj pyli»: http://www.libelium.com/products/waspmote/ (accessed 11.12.2014).
- FlyPort sensornaja platforma «umnoj pyli»: http://www.openpicus.com.
- Yuen Hui Chee, M. Koplow, M. Mark, N. Pletcher, M. Seeman, F. Burghardt, D. Steingart, J. Rabaey, P. Wright, S. Sanders, “PicoCube: A 1cm3 sensor node powered by harvested energy,” in Proc. DAC, 2008, pp.114-119.
- J. Lu, H. Okada, T. Itoh, T. Harada, R. Maeda, R., “Towards the world smallest wireless sensor nodes with ultra-low power consumption,” IEEESensors J., vol.14, no.6, pp.2035-2041, June 2014.
- M. Magno, D. Boyle, D. Brunelli, B. O'Flynn, E. Popovici, L. Benini, “Extended wireless monitoring through intelligent hybrid energy supply,” IEEE Trans. onInd. Electron., vol.61, no.4, pp.1871-1881, April 2014.
- MICAz sensornaja platforma «umnoj pyli»: http://www.openautomation.net/uploadsproductos/micaz_datasheet.pdf (accessed 11.12.2014).
- TinyOS – operacionnaja sistema dlja besprovodnyh sensornyh modulej «umnoj pyli»: http://www.tinyos.net/.
- P. Levis, S. Madden, J. Polastre, R. Szewczyk, K. Whitehouse, A. Woo, D. Gay, J. Hill, M. Welsh, E. Brewer, and D. Culler, “Tinyos: An operating system for sensor networks,” in Ambient Intelligence, W. Weber, J. Rabaey, and E. Aarts, Eds. Springer Berlin Heidelberg, 2005, pp. 115–148.
- L. Mottola, G. P. Picco, M. Ceriotti, Ş. Gunǎ, and A. L. Murphy. 2010. Not all wireless sensor networks are created equal: A comparative study on tunnels. ACM Trans. Sen. Netw. 7, 2, Article 15 (September 2010), 33 pages.
- M. Ceriotti, L. Mottola, G.P. Picco, A.L. Murphy, S. Guna, M. Corra, M. Pozzi, D. Zonta, P. Zanon, "Monitoring heritage buildings with wireless sensor networks: The Torre Aquila deployment," International Conference onInformation Processing in Sensor Networks, 2009. IPSN 2009, pp.277-288, 13-16 April 2009.
- BTnode sensornaja platforma «umnoj pyli»: http://www.btnode.ethz.ch/(accessed 11.12.2014).
- Meshlium – besprovodnoj koncentrator sensornoj seti: http://www.libelium.com/products/meshlium/.
- C.Peter, S.Schulz, M.Barth, M.Gempp, S.Rademacher, J.Wollenstein, “Low-cost roll-to-roll colorimetric gas sensor system for fire detection,” 2013 Transducers & Eurosensors XXVII: The 17th International Conference onSolid-State Sensors, Actuators and Microsystems, pp.2632-2635, 16-20 June 2013.
- S.Beirne, K.T.Lau, B.Corcoran, D.Diamond, “Automatic reaction to a chemical event detected by a low-cost wireless chemical sensing network,” 2009 IEEESensors, pp.69-72, 25-28 Oct. 2009.
- Y.W. Kim, S.J. Lee, G.H. Kim, G.J. Jeon, “Wireless electronic nose network for real time gas monitoring system,” in Proc. ROSE, 2009, pp. 169–172.
- S. So, F. Koushanfar, A. Kosterev, F. Tittel, “LaserSPECks: Laser SPECtroscopic Trace-Gas Sensor Networks - Sensor Integration and Applications,” 6th International Symposium on Information Processing in Sensor Networks, pp.226-235, 25-27 April, 2007.
- A. Somov, A. Baranov, A. Savkin, D. Spirjakin, A. Spirjakin, and R. Passerone. Development of wireless sensor network for combustible gas monitoring. Elsevier Journal on Sensors and Actuators, A: Physical 171(2): 398-405, 2011.
- A. Somov, D. Spirjakin, M. Ivanov, I. Khromushin, R. Passerone, A. Baranov, and A. Savkin. Combustible gases and early fire detection: an autonomous system for wireless sensor networks. In Proceedings of the First ACM International Conference on Energy-Efficient Computing and Networking (e-Energy’10), pp. 85-93, Passau, Germany, April 13-15, 2010.
- A. Somov, A. Baranov, D. Spirjakin, R. Passerone. Circuit design and power consumption analysis of wireless gas sensor nodes: one-sensor versus two-sensor approach. IEEE Sensors Journal 14(6): 2056-2063, 2014.
- A. Somov, A. Baranov, A. Savkin, M. Ivanov, L. Calliari, R. Passerone, E. Karpov, and A. Suchkov. Energy-aware gas sensing using wireless sensor networks. In Proceedings of the 9th European Conference on Wireless Sensor Networks (EWSN’12), LNCS vol. 7158, pp. 245-260, Trento, Italy, February 15-17, 2012.