МЕТОДИКА ОПРЕДЕЛЕНИЯ ТИПА ЛЕТАТЕЛЬНОГО АППАРАТА
Мазаков Е.Б.1, Антропов В.В.2
1 Кандидат технических наук, Национальный минерально-сырьевой университет «Горный», 2 Аспирант, Национальный минерально-сырьевой университет «Горный
МЕТОДИКА ОПРЕДЕЛЕНИЯ ТИПА ЛЕТАТЕЛЬНОГО АППАРАТА
Аннотация
В статье рассматривается методика определения типа летательного аппарата с помощью нейронных сетей.
Ключевые слова: база данных, нейронные сети, тип.
Mazakov E.B.1, Antropov V.V.2
1 PhD in Engineering, National Mineral Resources University, 2 Postgraduate student, National Mineral Resources University
METHOD FOR DETERMINING AIRCRAFT TYPE
Abstract
The article considers the method of determining the type of the aircraft with the help of neural networks.
Keywords: database, neural networks, type.
В настоящее время гражданская авиация выполняет обширный круг задач. Количество летательных аппаратов с каждым годом увеличивается. Кроме пассажирской и транспортной авиации широкое распространение завоевывают небольшие летательные аппараты или авиация общего назначения (АОН). С увеличением видов летательных аппаратов контроль воздушного пространства постоянно усложняется, возникают трудности с определением типов летательных аппаратов. За последние десятилетия развитие аппаратуры радиолокационных станций (РЛС) не совершило какой-либо большой сачок. В связи с этим, развитие задачи распознавания зависит от степени совершенствования существующих и разработки новых методик. Проанализировав существующие РЛС и методики, можно сказать что, решение такого рода задачи связано с определенными погрешностями. Частично это объясняется увеличением количества полетов, развитием авиастроительной техники и как следствие уменьшением времени на процесс распознавания воздушного объекта. Также развитие техники и беспроводных технологий увеличивает количество излучений, влияющих и вносящих помехи, в работу РЛС. Поэтому возникает необходимость в совершенствовании средств и методик, позволяющих за меньшее время и с большей достоверностью определить тип летательного аппарата.
Предлагается вариант определения типа летательного аппарата по траекторным параметрам (высоте полёта, скорости по прямой, скорости набора высоты, скорости смены курса) и ЭПР с использованием нейросетевых технологий. Исходными данными для решения задачи является информация о тактико-технических характеристиках типов летательных аппаратов (диапазоны в которых могут находиться), измеренные значения траекторных параметров средствами РЛС и значение степени вероятности, что это определенный тип воздушного объекта.
Решение задачи начинается с обработки данных о тактико-технических характеристиках летательных аппаратов. По ним делаются однозначные выводы о том, какие воздушные параметры наиболее характерны для того или иного типа ЛА. Затем данные сводятся в таблицы с определенным шагом дискретности (зависит степени точности определяемого параметра). Далее четко определяются границы параметра, которые наиболее характерны для этого типа воздушного объекта и им присваивается наивысшая степень принадлежности (равная единице), остальным степень принадлежности присваивается в соответствии с шагом дискретности и вероятности, что у воздушного объекта будут такие значения измеренного параметра. Эта процедура проводится по каждому параметру отдельного типа воздушного объекта. Таким образом, получают множества априорных степеней принадлежности каждого типа летательного аппарата по всем траекторным параметрам.
При получении измеренных параметров о летательном аппарате и известной ошибке измерения производится расчет соответствующих степеней принадлежности по формуле:
![]() . (1)
. (1)
Так получают степени принадлежности измеренных траекторных параметров [1]. Далее проводится сравнение соответствующих степеней принадлежности (априорной и апостериорной) по всем параметрам каждого типа. Определяются минимальные значения степеней принадлежности (![]() ) для каждого типа воздушного объекта по всем параметрам (высоте, скорости и.т.д.).
) для каждого типа воздушного объекта по всем параметрам (высоте, скорости и.т.д.).
Полученные минимальные значения степеней принадлежности каждого типа необходимы для расчета итоговой степени принадлежности по каждому типу летательного аппарата. Расчет производится по формуле [1]:
![]() , (2)
, (2)
где ![]() – минимальные значения степеней принадлежности одного типа воздушного объекта, при классификации по двум воздушным параметрам) для каждого типа летательного аппарата. Рассчитанные значения сравниваются, максимальное значение итоговой степени принадлежности из полученных, показывает, к какому типу следует относить ЛА.
– минимальные значения степеней принадлежности одного типа воздушного объекта, при классификации по двум воздушным параметрам) для каждого типа летательного аппарата. Рассчитанные значения сравниваются, максимальное значение итоговой степени принадлежности из полученных, показывает, к какому типу следует относить ЛА.
Проанализировав имеющиеся и перспективные способы обработки информации, предлагается вариант распознавания воздушного объекта с применением нейросетевых технологий (в частности нейросетей). Их использование позволяет однозначно определить тип летательного аппарата, оперируя данными, лежащими в определенном интервале (высота полёта и скорости летательного аппарата, ЭПР).
Математическая постановка задачи:
Необходимо синтезировать нейронную сеть для определения типа летательного аппарата.
Входными данными являются характеристики летательного объекта:
- высота полета (H);
- скорость по прямой (Vs);
- скорость по набора высоты (Vh);
- скорость смены курса (Vc);
- эффективная поверхность рассеивания (ЭПР).
Выходными данными являются степени принадлежности к типу воздушного объекта.
Ограничения, накладываемые на задачу:
- в задаче используется четыре типа летательных объектов: транспортный самолет (ТС), легкий многоцелевой самолет (ЛМС), вертолет, аэростат;
- ошибка определения степени принадлежности к типу воздушного объекта не должна превышать E ≤ 10%.
Решение задачи:
Подготовка данных. Исходя из тактико-технических характеристик каждого летательного аппарата, определяем:
- параметры высоты полета (min, ... ,max), с шагом дискретности 100 м;
- параметры скорости полета по прямой (min, ... , max), с шагом дискретности 10 км/ч;
- параметры скорости набора высоты (min, … , max), с шагом дискретности 5 м/с;
- параметры скорости смены курса (min, ... , max), с шагом дискретности 5 град/с;
- параметры эффективной поверхности рассеивания.
Входной вектор X будет представлять собой совокупность переменных ![]() , где:
, где:
- ![]() - высота полета (H), где 10 < H < 10000 м;
- высота полета (H), где 10 < H < 10000 м;
- ![]() - скорость полета по прямой (Vs), где 10 < V < 1500 км/ч;
- скорость полета по прямой (Vs), где 10 < V < 1500 км/ч;
- ![]() - скорость набора высоты (Vh), где 5 < V < 500 м/с;
- скорость набора высоты (Vh), где 5 < V < 500 м/с;
- ![]() - скорость смены курса (Vc), где 0 < V < 360 град/с;
- скорость смены курса (Vc), где 0 < V < 360 град/с;
- ![]() - эффективная поверхность рассеивания (ЭПР), где
- эффективная поверхность рассеивания (ЭПР), где
0,01 < ЭПР < 100 м2.
![]()
Выходной вектор Y – совокупность переменных ![]() ,
,
где:
- ![]() - степень принадлежности к типу летательного аппарата ТС;
- степень принадлежности к типу летательного аппарата ТС;
- ![]() - степень принадлежности к типу летательного аппарата ЛМС;
- степень принадлежности к типу летательного аппарата ЛМС;
- ![]() - степень принадлежности к типу летательного аппарата вертолет;
- степень принадлежности к типу летательного аппарата вертолет;
- ![]() - степень принадлежности к типу летательного аппарата аэростат.
- степень принадлежности к типу летательного аппарата аэростат.
![]()
Формирование базы данных. На основании входных данных сформирован входной файл, состоящий из двадцати строк. Вся база данных случайным образом разбивалась на два подмножества обучающее и тестовое (по 10 примеров в каждом множестве).
Предобработка данных. Так как нейронные сети работают со значениями, лежащими в интервале [0;1], было произведено масштабирование данных.
Пример результатов масштабирования представлен в Таблице 1, где ![]() - исходное значение входного параметра, а
- исходное значение входного параметра, а ![]() - масштабированное значение входного параметра.
- масштабированное значение входного параметра.
Таблица 1 - Масштабированные входные данные о высоте полета ЛА

Выбор метода интерпретации. Так как решаемая задача является задачей классификации, в качестве метода интерпретации ответов сети был выбран метод - нечеткая классификация (значения выходов нейронов интерпретируются как меры уверенности принадлежности к тому, или иному классу с указанием наилучшего приближения к какому-то классу).
Формирование обучающей выборки. Входные данные сводились в таблицы с определенным шагом дискретности (зависит степени точности определяемого параметра). Далее четко определялись границы параметра, которые наиболее характерны для этого типа летательного аппарата и им присваивается наивысшая степень принадлежности (равная единице), остальным степень принадлежности присваивалась в соответствии с шагом дискретности и степени по оценкам экспертов. Эта процедура проводилась по каждому параметру отдельного типа летательного аппарата. Таким образом, получили множества степеней принадлежности для каждого типа летательного аппарата по всем траекторным параметрам. Исходя из измеренных параметров о летательном аппарате, по каждому ЛА из таблиц выбирались степени принадлежности соответствующие им. Таким образом, получили степени принадлежности каждого типа летательного аппарата по всем воздушным параметрам (![]() , где i показывает тип объекта, а
, где i показывает тип объекта, а ![]() - воздушный параметр (высота полёта, скорость по прямой, скорость набора высоты, скорость смены курса, эффективная отражающая поверхность).
- воздушный параметр (высота полёта, скорость по прямой, скорость набора высоты, скорость смены курса, эффективная отражающая поверхность).
Расчет итоговых степеней принадлежности для каждого типа летательного аппарата производится по формуле:
![]() , (3)
, (3)
где
- ![]() - степень принадлежности к типу ЛА по высоте полёта;
- степень принадлежности к типу ЛА по высоте полёта;
- ![]() - степень принадлежности к типу ЛА по скорости по прямой;
- степень принадлежности к типу ЛА по скорости по прямой;
- ![]() - степень принадлежности к типу ЛА по скорости набора высоты;
- степень принадлежности к типу ЛА по скорости набора высоты;
- ![]() - степень принадлежности к типу ЛА по скорости смены курса;
- степень принадлежности к типу ЛА по скорости смены курса;
- ![]() - степень принадлежности к типу ЛА по ЭПР;
- степень принадлежности к типу ЛА по ЭПР;
- ![]() - итоговая степень принадлежности к типу ЛА.
- итоговая степень принадлежности к типу ЛА.
Итоговые степени принадлежности показывают, к какому типу летательного аппарата следует относить определяемый объект.
Из совокупности масштабированных входных данных и рассчитанных итоговых степеней принадлежности, была сформирована обучающая выборка для выбранного метода интерпретации (нечеткая классификация).
Выбор функции оценки работы сети. В качестве ошибки обучения сети рассматривалась среднеквадратичная ошибка, усредненная по выборке:
![]() , (4)
, (4)
где,
- ![]() - ошибка сети, появляющаяся в некотором состоянии
- ошибка сети, появляющаяся в некотором состоянии ![]() ;
;
- ![]() - число примеров в обучающей выборке;
- число примеров в обучающей выборке;
- ![]() - эталонный выходной вектор i-го примера.
- эталонный выходной вектор i-го примера.
Конструирование нейронной сети. Для рассматриваемой задачи были исследованы три различные конфигурации сети, при этом использовались сети с прямой связью персептронного типа с тремя слоями.
Таблица 2 - Варианты конфигурации нейронной сети
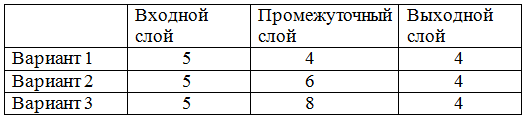
Все сети имели 5 входных узла (каждый параметр воздушного объекта подавался на свой входной узел), 4 выходных узла (для выдачи степени принадлежности по каждому типу воздушного объекта), число скрытых элементов менялось от 4 до 8 (4;6;8).
В качестве функции активации использовалась сигмоидальная функция, принимающая на выходе нейрона значения от 0 до 1.
Обучение сети. Обучение сети проводилось с помощью нейроимитатора NNW_trend с использованием метода обратного распространения ошибки. Начальные значения весов брались случайным образом в интервале [-0.1;0.1]. Обучение занимало от 5 до 10 итераций (в зависимости от архитектуры сети). В процессе обучения выяснилось, что сети с большим числом элементов в скрытом слое обучаются быстрее.
Работа сети в режиме распознавания. При подаче на вход сети вектора, не входящего ни в обучающую, ни в тестовую выборки, соответствующего определенному типу ЛА, сеть выдавала правильный результат. Оказалось, что процент правильных ответов сети растет с увеличением количества обучающих примеров, однако при достижении определенного числа примеров в обучающей выборке качество распознавания остается примерно таким же. Реальные значения, полученные сетью, сравнивались с результатами математических расчетов, процент правильных ответов составил 85-90 от общего количества.
В результате проделанной работы была синтезирована нейронная сеть для распознавания типа летательного аппарата со следующими характеристиками:
- топология сети построена на основе многослойного персептрона, состоящего из 3 слоев (входной слой – 5 нейронов, скрытый слой – 8 нейронов, выходной слой – 4 нейрона);
- в качестве функции активации использовалась сигмоидальная функция, принимающая на выходе нейрона значения от 0 до 1;
- обучение сети проводилось с помощью метода обратного распространения ошибки;
- достоверность выходных данных составляет ~ 85 - 90%.
Полученные результаты показывают, что обученная нейронная сеть может быть использована в радиолокационных станциях общего назначения для распознавания типа летательного аппарата.
Литература
- Бонгард М.М. Проблема узнавания. – М.: Наука, 1967. – 321 с.
- Пивкин В.Я., Бакулин Е.П, Кореньков Д.И. Нечеткие множества в системах управления. М. 2002. – 39 с.
- Осовский С. Нейронные сети для обработки информации. М: ФиС, 2003. - 344 с.
- Уоссермен Ф. Нейрокомпьютерная техника: теория и практика. – М.: Мир, 1992. – 240 с.
- Хайкин С. Нейронные сети. Полный курс. М. 2006. – 1104 с.
- Яковлев С.С. Система распознавания движущихся объектов на базе искусственных нейронных сетей. – Минск, 2004. – 230-234 с.
References
- Bongard M.M. The problem of recognition. – M.: Nauka, 1967. – 321 p.
- Pivkin V.Y., Bakunin E.P, Korenjkov D.I. Fuzzy sets in management systems. M.: Mir, 2002. – 39 p.
- Osovskiy S. Neural network for processing information. М: FiS, 2003. - 344 p.
- Wosserman F. Neural Computing. Theory and Practice. – M.: Mir, 1992. – 240 p.
- Khaykin S. Neural networks. M. 2006. – 1104 p.
- Yakovlev S.S. Recognition system of moving objects based on artificial neural networks. – Minsk, 2004. – 230-234 p.