ЭКОНОМИЧНЫЙ БЕЗБАЛАНСИРНЫЙ ПРИВОД ШТАНГОВОГО CКВАЖИННОГО НАСОСА
Шаньгин Е.С.1, Колесник С.В.2
1Доктор технических наук, 2Кандидат технических наук, филиал ТИУ в г. Нижневартовске
ЭКОНОМИЧНЫЙ БЕЗБАЛАНСИРНЫЙ ПРИВОД ШТАНГОВОГО CКВАЖИННОГО НАСОСА
Аннотация
Использование для нефтеизвлечения управляемого привода штангового скважинного насоса позволяет уменьшить энергопотребление процессом нефтеизвлечения на (25…30) %, а также снизить затраты на изготовление, транспортировку и эксплуатацию наземного привода. Перспективными методами снижения затрат на добычу нефти можно считать введение в эксплуатацию бездействующих скважин путем применения наземного привода скважинного штангового насоса винтового типа (бездействующие скважины из-за болотистого грунта или из-за малодебитного режима могут быть введены в строй действующих с помощью электропривода контейнерного типа, оказывающего на грунт давление не более 0,2 кг/см2, а возможность бесступенчатого регулирования его рабочих режимов в широких пределах - от 0,5 до 8 качаний в минуту - позволяет выбрать режим, согласующийся с индивидуальными характеристиками скважин), а так же, оснащение действующих балансирных станков-качалок регулируемыми приводами позволит продлить период активного нефтеизвлечения из высокообводнённых малодебитных скважин и уменьшить удельные затраты энергии на 10 – 25 % за счет уменьшения обводнённости скважинной жидкости.
Ключевые слова: безбалансирный привод, ролико-винтовая пара, уменьшение электропотребления.
Shangin E.S.1, Kolesnik S.V.2
1PhD in Engineering, 2PhD in Engineering, TIU branch in Nizhnevartovsk
ECONOMY BALANCER DRIVES OF BULL BOREHOLES PUMP
Abstract
Using adjustable speed drive of downhole sucker-rod pumps (SRP) for oil production can reduce power consumption in the process of oil extraction about 25–30% and cut down expenses on manufacture, transporting and operation of ground drive. Putting into operation idle well stock by applying a ground drive of screw type sucker rod pumps can be considered as a promising technique of reducing the cost of oil production (due to boggy ground or low production mode idle wells can be put into production by means of a container-type electric drive, exerting pressure on the ground of not more than 0.2 kg/cm2, and the possibility of stageless adjustment of its operating modes, able to operate across a broad range of pumping rates – from 0.5 to 8 cycles per minute – allows to select the mode in compliance with the characteristics of the certain wells), as well as equipping the functioning beam-balanced pumping units with variable-speed drives will extend the period of active oil recovery from high water cut marginal wells and reduce unit cost of energy about 10–25% by decreasing the water content of the well fluid.
Keywords: balancer drive roller screw pair, reducing power consumption.
Морально устаревшие приводы скважинных насосов балансирного типа не позволяют устанавливать режимы подачи насоса в соответствии с реальным дебитом скважин. Поэтому для уменьшения энергопотребления и совершенствования характеристик насосной установки необходимы технические решения, которые позволили бы создать электропривод, удовлетворяющий требованиям по энергосбережению и управляемости [1].
Особенного внимания требуют малодебитные скважины в силу их многочисленности (до 70 % от действующего фонда скважин) и отсутствия технологического оборудования, соответствующего по своим параметрам, главным образом производительности, дебиту скважин [3, 8].
Из 160 тыс. продуктивных скважин в России более 15 тыс. не эксплуатируются по тем или иным причинам. В число причин простоя скважин можно отнести слабые и заболоченные грунты, не позволяющие устанавливать тяжёлые насосные установки балансирного типа, а также их малый диапазон управления производительностью, главным фактором которого является бесступенчатое изменение двойных ходов полированного штока в минуту [2, 6].
По мере истощения нефтегазовых и нефтеконденсатных месторождений Западной Сибири доля малопродуктивных скважин постепенно возрастает. Другим обстоятельством, пополняющим эту категорию скважин, является снижение их продуктивности по нефти с переходом на чисто газовые в направлении к северу Тюменской области.
Переход в малодебитную стадию частично обеспечивается применением электроцентробежных наосов в режиме периодической откачки скважинной жидкости. Эта вынужденная мера в большинстве случаев применяется из-за отсутствия приемлемых альтернатив балансирному приводу штанговых насосов.
Для снижения затрат на энергоснабжение нефтедобывающего оборудования необходимо исключить из состава скважинной жидкости воду, уменьшив её содержание до 1-2 %. Для осуществления такого режима нефтедобычи необходимо производительность насосной установки согласовать с реальным дебитом скважины [4, 5]. Это, в свою очередь, требует применения регулируемого по скорости электропривода, способного бесступенчато изменять режим работы насоса и уменьшать тем самым энергопотребление [7]. При исключении воды из скважинной жидкости дисконтированный доход возрастает на 8-10 % для каждого способа нефтеизвлечения.
Реализация управляемого режима скважинных штанговых насосов (CШН) связана с выбором рациональной конструкции наземного привода [2].
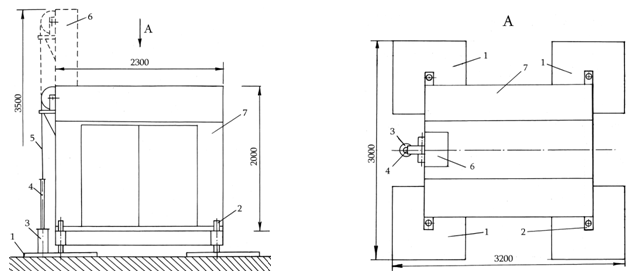
Рис. 1 - Общий вид наземного винтового привода скважинного штангового насоса
1-опорная плита; 2-винтовая опора; 3-устьевая арматура скважины; 4-сальниковый шток насоса; 5-гибкий элемент (цепь); 6-телескопический подъемник; 7-контейнер с механизмом привода
Безбалансирный привод представляет собой контейнер (рис. 1), в котором размещена телескопическая стойка 1 и два вертикальных винта 2 и 3 (рис. 2). Винты соединены между собой зубчатыми колёсами 4 и 5, а также с электродвигателем 6. Гайки 7 вертикальных винтов 2 и 3 соединены с роликами 8 для цепи 9, опирающейся на опорные звёздочки 10 и 11.
Ниже приведена схема создания периодических колебаний безбалансирного привода на основе использования ролико-винтовой пары (рис. 2).
Привод работает следующим образом.
После включения электродвигателя 6 (рис. 2) вращение передаётся через зубчатые колёса 4 и 5 вертикальным винтам 2 и 3. При этом они начинают вращаться в противоположных направлениях, а их гайки 7 будут двигаться в разные стороны – одна вверх, другая вниз.
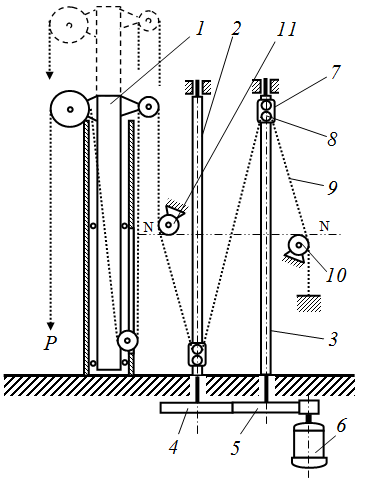
Рис. 2 - Кинематическая схема винтового привода скважинного штангового насоса
1-телескопическая стойка; 2, 3-вертикальные винты; 4, 5-зубчатые колёса; 6-электродвигатель; 7-гайка; 8-ролик; 9-цепь; 10, 11-опорная звёздочка
Вместе с ними движутся ролики 8 с перекинутой через них цепью 9. В результате этих движений цепь 9 укорачивается и поднимает груз P (т.е. полированный шток скважинного штангового насоса). Когда гайки 7 доходят до своих крайних положений, датчик положения (не показан) подаёт сигнал электродвигателю 6, который выключается, а груз Р начинает опускаться под собственным весом (ролико-винтовые пары выбраны несамотормозящиеся). Когда цепь 9 займёт положение параллельно прямой N-N, двигатель 6 включается и, продолжая поднимать груз Р, разводит гайки в противоположные положения до упора, после чего двигатель 6 выключается. За один полный ход гаек 7 от крайнего верхнего до крайнего нижнего положения груз Р поднимается два раза.
При максимальной нагрузке на подвесе 120 кН привод имеет мощность электродвигателя 7,5 кВт, высоту подъёма штока насоса 1,5–3 м, регулируемое число двойных ходов от 0,5 до 8 мин-1. Без увеличения габаритов привода высоту подъёма штока можно увеличить до 6 метров за счёт доработки телескопической стойки 1. Скорость спуска и подъёма насоса регулируется скоростью вращения электродвигателя 6, который имеет частотное управление и может изменять скорость в широких пределах. Высота подъёма насоса регулируется перестановкой датчиков рабочего хода командоаппарата. В качестве путевых датчиков применяются конечные выключатели взрывозащищённого типа.
По сравнению с устройствами аналогичного назначения, например, балансирными станками-качалками, предлагаемое техническое решение имеет следующие преимущества:
- возможность непрерывной откачки нефти из малодебитных скважин;
- сокращение металлоемкости в 3,5 раза;
- уменьшение энергопотребления в 2 раза;
- возможность использования на слабых заболоченных грунтах;
- простота конструкции обеспечивает технологичность производства и снижает себестоимость изготовления привода.
Использование для нефтеизвлечения управляемого привода штангового скважинного насоса позволяет уменьшить энергопотребление процессом нефтеизвлечения на (25…30) %, а также снизить затраты на изготовление, транспортировку и эксплуатацию наземного привода. Конструкция привода, его вес и габариты позволяют транспортировать его любым видом транспорта (вплоть до вертолётного) к месту эксплуатации в состоянии заводской готовности, т.е. в готовом для эксплуатации виде. Для его установки на продуктивной скважине не требуется производить строительно-монтажные работы, включающие бетонирование фундамента, сборку насосной установки и пр. Достаточно сделать гравийную отсыпку и провести установку привода с использованием грузоподъёмного крана в течение 3-4 часов.
Таким образом, перспективными методами снижения затрат на добычу нефти можно считать:
- введение в эксплуатацию бездействующих скважин путём применения наземного привода скважинного штангового насоса винтового типа (бездействующие скважины из-за болотистого грунта или из-за малодебитного режима могут быть введены в строй действующих с помощью электропривода контейнерного типа, оказывающего на грунт давление не более 0,2 кг/см2, а возможность бесступенчатого регулирования его рабочих режимов в широких пределах - от 0,5 до 8 качаний в минуту - позволяет выбрать режим, согласующийся с индивидуальными характеристиками скважин);
- оснащение действующих балансирных станков-качалок регулируемыми приводами позволит продлить период активного нефтеизвлечения из высокообводнённых малодебитных скважин и уменьшить удельные затраты энергии на 10 – 25 % за счет уменьшения обводнённости скважинной жидкости (расчетные данные).
Литература
- Адонин, А. Н. Добыча нефти штанговыми насосами/А.Н. Адонин. – М.: Недра, 1979. –386 c.
- Ильясов, Б. Г. Автоматизированный привод штанговых глубинных насосов маятникового типа/ Б. Г. Ильясов, Е. С. Шаньгин // Мехатроника, автоматизация, управление. 2012. № 1. –С. 18–24.
- Валеев, М. Д. Глубиннонасосная добыча вязкой нефти/ М.Д. Валеев, М.М. Хасанов. –Уфа: Башкнигоиздат, 1992. –122 с.
- Справочник – автоматизация, приборы контроля и регулирования//5-автоматическое регулирование.–М.: Недра. 1967. –586 с.
- Тер-Хачатуров, А. А. Автоматический контроль и диагностика скважинных штанговых насосных установок/ А. А. Тер-Хачатуров, Т. М. Алиев. – М.: Недра. 1988. – 296 с.
- Вещев, О. Н. Телемеханические комплексы для нефтяной промышленности./ О. Н. Вещев. – Уфа: УНИ. 1988. –98 с.
- Касимов, Л. Н., Шаньгин, Е. С. Привод глубинного насоса./Патент RU № 2163311. МПК F 04 B 47/02. БИ № 5. 2000.
- Кусимов С.Т., Ильясов Б.Г., Шаньгин Е.С. и др. Информационно-управляющие системы в нефтедобывающей промышленности (монография) – М: «Машиностроение». 2009. – 658 с.
References
- Adonin, A. N. Dobycha nefti shtangovymi nasosami/A.N. Adonin. – M.: Nedra, 1979. –386 c.
- Il'jasov, B. G. Avtomatizirovannyj privod shtangovyh glubinnyh nasosov majatnikovogo tipa/ B. G. Il'jasov, E. S. Shan'gin // Mehatronika, avtomatizacija, upravlenie. 2012. № 1. –S. 18–24.
- Valeev, M. D. Glubinnonasosnaja dobycha vjazkoj nefti/ M.D. Valeev, M.M. Hasanov. –Ufa: Bashknigoizdat, 1992. –122 s.
- Spravochnik – avtomatizacija, pribory kontrolja i regulirovanija//5-avtomaticheskoe regulirovanie.–M.: Nedra. 1967. –586 s.
- Ter-Hachaturov, A. A. Avtomaticheskij kontrol' i diagnostika skvazhinnyh shtangovyh nasosnyh ustanovok/ A. A. Ter-Hachaturov, T. M. Aliev. – M.: Nedra. 1988. – 296 s.
- Veshhev, O. N. Telemehanicheskie kompleksy dlja neftjanoj promyshlennosti./ O. N. Veshhev. – Ufa: UNI. 1988. –98 s.
- Kasimov, L. N., Shan'gin, E. S. Privod glubinnogo nasosa./Patent RU № 2163311. MPK F 04 B 47/02. BI № 5. 2000.
- Kusimov S.T., Il'jasov B.G., Shan'gin E.S. i dr. Informacionno-upravljajushhie sistemy v neftedobyvajushhej promyshlennosti (monografija) – M: «Mashinostroenie». 2009. – 658 s.