МОДЕЛИРОВАНИЕ СКР-ЛИДАРНОГО СИГНАЛА ДЛЯ ЛОКАЛИЗОВАННОГО ИСТОЧНИКА ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ
Бобровников С.М.1, Горлов Е.В.2, Жарков В.И.3
1,2, Кандидат физико-математических наук, доцент, 3 Кандидат физико-математических наук, Институт оптики атмосферы им. В.Е. Зуева СО РАН
Работа выполнена при частичной финансовой поддержке Российского научного фонда (грант № 14-27-00022) и гранта Президента РФ для государственной поддержки молодых российских ученых МК-6286.2015.10.
МОДЕЛИРОВАНИЕ СКР-ЛИДАРНОГО СИГНАЛА ДЛЯ ЛОКАЛИЗОВАННОГО ИСТОЧНИКА ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ
Аннотация
Рассмотрена математическая модель процесса зондирования атмосферы на основе эффекта СКР в УФ области спектра. Разработанная модель позволяет, опираясь на спектроскопическую информацию об объекте обнаружения, параметры среды распространения излучения и параметры приемопередающей аппаратуры, рассчитывать величину ожидаемого лидарного сигнала и оптимизировать характеристики СКР-лидара. Представлены результаты расчетов дистанционного обнаружения паров некоторых химических соединений в атмосфере с помощью СКР-лидара, построенного на базе эксимерного лазера на среде KrF.
Ключевые слова: лидар, комбинационное рассеяние, газовый анализ, атмосфера.
Bobrovnikov S.M.1, Gorlov E.V.2, Zharkov V.I.3
1,2 PhD in Physics and Mathematics, associate professor; 3 PhD in Physics and Mathematics, V.E. Zuev Institute of Atmospheric Optics SB RAS
SIMULATION OF THE RAMAN LIDAR SIGNAL FOR LOCALIZED SOURCE OF ATMOSPHERIC POLLUTION
Abstract
A mathematical model of the process of the atmosphere sounding based on the Raman scattering effect in UV region of the spectrum is considered. The developed model allows to calculate an expected value of the lidar signal and optimize the characteristics of the Raman lidar using spectroscopic information about the detected object, parameters of the radiation propagation medium, and parameters of the transceiver equipment. The results of calculations of remote detection of vapors of some chemical compounds in the atmosphere using Raman lidar constructed on the basis of a KrF excimer laser are presented.
Keywords: Lidar, Raman scattering, gas analysis, atmosphere.
Особое место в исследовании газового состава атмосферы занимают лидарные методы. Эти методы наиболее перспективны, т.к. позволяют получать информацию о пространственно-временном распределении примесей в атмосфере дистанционно и оперативно. Возможность регистрации всех компонентов спектра одновременно в широком диапазоне частотных сдвигов делает метод на основе эффекта спонтанного комбинационного рассеяния (СКР) привлекательным для дистанционной диагностики окружающей среды.
Использование многоканального спектроанализатора в приемной аппаратуре СКР-лидара имеет свои особенности и требует единого подхода при проектировании лидарной системы, который позволил бы осуществить согласование всех элементов приемопередающего оптического тракта лидара. При этом выбор источника возбуждающего излучения является важным этапом разработки СКР-лидара, во многом определяющим его облик и потенциальные возможности.
При создании систем дистанционного контроля химического состава окружающей среды с небольшой дальностью действия (5–300 м), когда возрастание потерь не столь существенно сказывается на потенциале лидара, лазерный источник с длиной волны излучения короче 250 нм кажется достаточно привлекательным, поскольку обеспечивает как высокое сечение взаимодействия (в том числе за счет возможного предрезонансного усиления), так и выгодное расположение частотных сдвигов в «солнечно-слепой» области спектра (200–300 нм). При этом вероятность перекрытия спектров СКР и флуоресценции существенно меньше, чем при возбуждении более длинноволновым излучением [1, 2]. Именно поэтому при проектировании СКР-лидара в качестве источника возбуждающего излучения был выбран эксимерный лазер на среде KrF (длина волны излучения 248,3 нм) [3].
Перед проектированием СКР-лидара нужно провести количественные оценки величины ожидаемого сигнала и оптимизировать характеристики лидара. Для решения этой задачи, очевидно, необходимо построить математическую модель процесса зондирования с использованием эффекта СКР. При этом в качестве входных данных модели, неизбежно, потребуется как спектроскопическая информация об объектах обнаружения, так и полный набор сведений о свойствах среды распространения излучения, так же как и необходимые технические характеристики компонентов аппаратуры лидара.
В самом общем случае, мощность лидарного отклика за один лазерный импульс можно записать в виде интеграла свертки:
 , , |
(1) |
где S(t) – форма лазерного импульса; H(r0,t) или H(r0,r) – импульсная переходная характеристика системы лидар-атмосфера, при фокусировке приемопередатчика на расстояние r0; r – расстояние от лидара до рассеивающего слоя; t – временная координата сигнала, связанная с расстоянием r через скорость распространения светового импульса:
| (2) |
где с – скорость света.
Импульсную переходную характеристику системы лидар-атмосфера можно записать как:
| (3) |
где A – площадь приемной апертуры; K0(λx) – коэффициент пропускания приемного оптического тракта лидара; η(λx) – квантовая эффективность фотодетектора; λx – длина волны принимаемого излучения; λ0 – длина волны зондирующего излучения; T(λ0,r) и T(λx,r) – спектральная прозрачность атмосферы для излучения с длиной волны λ0 и λx соответственно; βπ(λx,r0,r) – коэффициент обратного рассеяния; g(r0,r) – геометрическая функция лидара.
Для лидара, использующего эффект СКР, коэффициент обратного рассеяния можно выразить через сечение СКР и концентрацию [4]:
| (4) |
где dσ(λx)/dΩ – дифференциальное сечение СКР назад исследуемого компонента, Сn(r0,r) – концентрация исследуемого компонента.
С учетом того, что сечение СКР не зависит от плотности мощности лазерного импульса и при условии интегрирования лидарного сигнала по всей трассе зондирования, можно при вычислении интеграла от выражения (1) воспользоваться свойством преобразования Фурье для свертки. Тогда энергия, поступающая на фотоприемник со всей трассы, за один лазерный импульс при фокусировке передатчика и приемника на расстояние r0 вычисляется как:
 . . |
(5) |
C учетом:
 , , |
(6) |
где τ0 – эффективная длительность лазерного импульса, W – энергия в лазерном импульсе уравнение (5) примет вид:
 . . |
(7) |
С учетом (3) и (7) величина лидарного сигнала в числах фотонов за один лазерный импульс при фокусировке приемопередатчика на расстояние r0, примет вид:
 , , |
(8) |
где n0 – число фотонов в лазерном импульсе, определяемое выражением:
| (9) |
где h – постоянная Планка.
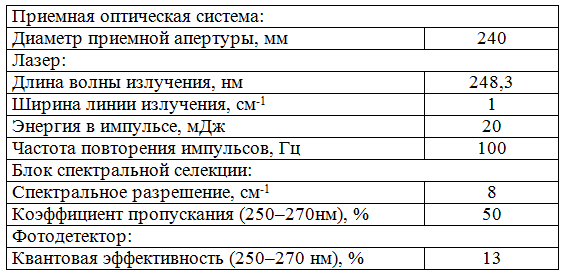
Расчет лидарного сигнала требует информации о параметрах лидара и об объекте исследований. С учетом выбранного лазерного источника (эксимерный лазер на среде KrF) и требований предъявляемых к спектральной аппаратуре лидара можно рассчитать параметры лидарной системы. Предполагаемые технические характеристики СКР-лидара представлены в таблице 1.
Таблица 1 -Технические характеристики СКР-лидара
С помощью модели (8) был проведен расчет лидарных откликов при зондировании паров некоторых химических соединений (четыреххлористого углерода, ацетона и двуокиси серы), на которых предполагалось проводить оценку чувствительности СКР-лидара. При этом рассчитывались зависимости времени обнаружения вещества от дальности обнаружения при фокусировке приемопередающей системы лидара в область локализации паров загрязняющего вещества. При этом протяженность облака паров загрязняющих веществ вдоль трассы зондирования принималась равной 10 м (±5 м от плоскости фокусировки приемопередающей системы лидара) с однородной концентрацией 1 ppm (рисунок 1).
Рис. 1 - Зависимость времени обнаружения загрязняющих веществ от дальности обнаружения
Как видно из рисунка, времена обнаружения исследуемых загрязняющих веществ существенно отличаются, что объясняется различием их дифференциальных сечений СКР. Также из рисунка видно, что попытка обнаружения загрязняющих веществ на больших дальностях (более 500 м) приводит к нелинейному возрастанию времени измерения и потере оперативности контроля. Это обстоятельство объясняется ослаблением сигналов СКР за счет интенсивного поглощения атмосферным озоном. Результаты расчетов показывают, что увеличение времени накопления сигнала позволяет сохранить предельную чувствительность СКР-лидарного метода при обнаружении загрязняющих компонентов атмосферы на дальностях до 500 м.
Литература
- Ray M.D., Sedlacek A.J. Ultraviolet mini-Raman lidar for stand-off, in-situ identification of chemical surface contaminants // Rev. Sci. Inst. 2000. V. 71, N 9. P. 3485-3489.
- Arthur J.S, and Mark D.R. Short-range, Non-contact Detection of Surface Contamination Using Raman Lidar // Proc. SPIE 4577. 2001. P. 95–104.
- Панченко Ю.Н., Андреев М.В., Бобровников С.М., Горлов Е.В., Дударев В.В., Иванов Н.Г., Лосев В.Ф., Павлинский А.В., Пучикин А.В., Жарков В.И. Узкополосная перестраиваемая лазерная система для лидарного комплекса // Изв. вузов. Физика. 2012. Т. 55. №6. С. 13–18.
- Лазерный контроль атмосферы / Под ред. Э.Д. Хинкли М.: Мир, 1979. – 416 с.
References
- Ray M.D., Sedlacek A.J. Ultraviolet mini-Raman lidar for stand-off, in-situ identification of chemical surface contaminants // Rev. Sci. Inst. 2000. V. 71, N 9. P. 3485-3489.
- Arthur J.S, and Mark D.R. Short-range, Non-contact Detection of Surface Contamination Using Raman Lidar // Proc. SPIE 4577. 2001. P. 95–104.
- Panchenko Y.N., Andreev M.V., Dudarev V.V., Ivanov N.G.,Pavlinskii A.V., Puchikin A.V., Bobrovnikov S.M., Gorlov E.V., Zharkov V.I., Losev V.F. Narrow-band tunable laser system for a lidar facility // Russian Physics Journal. 2012. Т. 55. № 6. С. 609-615.
- Hinkley E.D. Laser monitoring of the atmosphere. Springer-Verlag: New York, 1976.